Глава 25 ЛИНЕЙНЫЕ СИСТЕМЫ И ОБЗОР
Глава 25
ЛИНЕЙНЫЕ СИСТЕМЫ И ОБЗОР
§ 1. Линейные дифференциальные уравнения
§ 2. Суперпозиция решений
§ 3. Колебания в линейных системах
§ 4. Аналогии в физике
§ 5. Последовательные и параллельные сопротивления
§ 1. Линейные дифференциальные уравнения

В этой главе мы снова вернемся к некоторым аспектам наших колебательных систем, только постараемся теперь увидеть нечто более общее, стоящее за спиной каждой частной системы. Изучение каждой колебательной системы сводилось к решению дифференциального уравнения

Эта комбинация «операций» над переменной х обладает интересным свойством: если вместо х подставить (х+у), получится сумма одинаковых операций над х и y, а умножение х на число а сводится к умножению на это число первоначальной комбинации. Это легко доказать. Чтобы не переутомиться, записывая все буквы, вошедшие в (25.1), давайте введем «скорописные» обозначения. Обозначим всю левую часть уравнения (25.1) символом L(х). Увидев такой символ, вы должны мысленно представить себе левую часть уравнения (25.1). Поэтому, согласно этой системе, символ L(x+y) будет означать следующее:
(Подчеркнем букву L, чтобы не спутать этот символ с обычной функцией.) Иногда мы будем употреблять термин операторная запись, но совершенно безразлично, какими словами это называть, просто-напросто это «скоропись». Наше первое утверждение, что
L(x+y)=L(x)+L(y), (25.3)
следует из соотношений а(х+у)=ах+ау, d(x+y)/dt=dx/dt+-dy/dt и т. д.
Легко доказать, что для постоянного а
L(ax)=aL(x). (25.4)
[Соотношения (25.3) и (25.4) тесно связаны одно с другим, потому что, подставив в (25.3) х+х, мы получим (25.4) для частного значения а=2 и т. д.]
Решая более сложные задачи, можно получить L, в котором содержится больше членов и более высокие производные. Обычно первым делом интересуются, справедливы ли соотношения (25.3) и (25.4). Если они выполняются, то задачу называют линейной. В этой главе мы изучим некоторые свойства систем, следующие только из того факта, что система линейная. Это поможет нам понять общность некоторых свойств изученных ранее частных систем.
Давайте изучим некоторые свойства линейных дифференциальных уравнений, причем полезно помнить о хорошо знакомом нам частном уравнении (25.1). Первое интересное свойство: предположим, что мы решаем дифференциальное уравнение для переходных движений: свободных колебаний без действия внешних сил. Нам предстоит решить уравнение
L(x)=0. (25.5)
Предположим, что мы как-то исхитрились одолеть это уравнение и нашли его частное решение х1. Это значит, что нам известна функция x1, для которой L(x1)=0. После этого можно заметить, что ax1— тоже решение нашего уравнения; можно умножить частное решение уравнения на любую постоянную и получить новое решение. Иначе говоря, если какое-либо решение позволяет частице продвинуться на определенное расстояние, то она может совершить и более длинный рейс. Доказательство: L(ax1)=aL(x1)=a·0=0.
Предположим теперь, что нам удалось все-таки найти не одно частное решение x1, но и второе х2(напомним, что когда мы в поисках переходного решения подставляли x=exp(iat), то мы нашли два значения a, т. е. два решения: x1и х2). Покажем теперь, что комбинация x1+x2 — тоже решение. Иными словами, если положить x=x1+x2, то х — это опять решение уравнения. Почему? Потому что если L(x1)=0 и L(x2)=0, то L(xt+x2)=L(x1)+L(x2)=0+0=0. Таким образом, мы вправе складывать отдельные решения, описывающие движения линейной системы.
Продолжая в том же духе, мы можем сложить шесть первых и два вторых решения; ведь если x1есть решение, то ax1 — тоже решение. Другими словами, любая сумма двух решений, например ax1+bx2, удовлетворяет уравнению. Если нам посчастливится найти три решения, то мы увидим, что любая комбинация трех решений снова удовлетворяет уравнению, и т. д. Поток таких решений можно ограничить независимыми решениями; в случае осциллятора мы получили только два таких решения. Число независимых решений в общем случае зависит от того, что называется числом степеней свободы. Мы не будем сейчас подробно обсуждать этот вопрос, но в случае дифференциального уравнения второго порядка имеются лишь два независимых решения. Если мы найдем оба эти решения, то можно построить общее решение уравнения.
Посмотрим, что будет, когда на систему действует внешняя сила. Предположим, что нам встретилось уравнение
L(x)=F(t) (25.6)
и мы нашли его частное решение. Назовем его решением Джо xД, т. е. L(xД)=F(t). Хотелось бы найти еще одно решение этого уравнения. Добавим к решению Джо какое-нибудь решение свободного уравнения (25.5), например x1. Тогда, вспомнив о (25.3), получим
L(xД+xl)=L(xД)+L(x1)=F(t)+0=F(t). (25.7)
Следовательно, добавив к решению уравнения (25.6) любое «свободное» решение, мы получим новое решение. Свободное решение называют еще переходным решением.
Если неожиданно включить внешнюю силу, то движение осциллятора не сразу будет описываться равновесным (синусоидальным) решением: сначала к нему будут примешиваться переходные решения, которые, если подождать подольше, в конце концов «вымрут». Равновесное решение «выживет», потому что только оно соответствует внешней силе. В конце концов это будет единственным решением, но начальные движения системы зависят от того, какие обстоятельства сопутствуют включению силы.
§ 2. Суперпозиция решений
Перейдем теперь к другой интересной проблеме. Предположим, что нам задана какая-нибудь внешняя сила Fa(например, периодическая сила с частотой w=wа, но наши выводы будут верны для любой зависимости силы от времени) и мы нашли движение, соответствующее этой силе (переходные движения можно учитывать или не учитывать, это неважно). Предположим, что мы решили еще одну задачу — нашли движение в случае действия силы Fb. После этого предположим, что кто-то вбежал в комнату и сказал: «На контрольной задают задачу с силой Fa+Fb. Что нам делать?» Конечно, мы решим эту задачу — ведь мы сразу обнаружим одно замечательное свойство: сумма решений хаи хb, получаемых в том случае, если брать силы по отдельности, будет решением новой задачи. Для этого надо только вспомнить о (25.3):
L(xa+xb)=L(xa)+L(xb)=Fa(t)+Fb(t). (25.8)
Это пример того, что называют принципом суперпозиции для линейных систем, и это очень важная вещь. Дело обстоит так: если мы сможем представить сложную силу в виде суммы нескольких более простых сил и сможем решить уравнение для каждой силы в отдельности, то мы сможем решить и первоначальное уравнение, потому что для этого надо просто объединить куски решения так же, как мы объединяли отдельные силы, чтобы получить полную силу (фиг. 25.1).
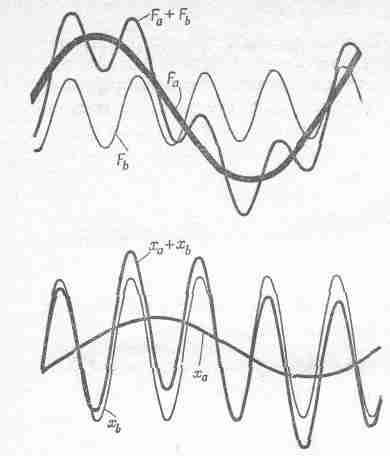
Фиг. 25.1. Пример принципа суперпозиции для линейных систем.
Еще один пример принципа суперпозиции. В гл. 12 (вып. 1) говорилось об одном из важнейших фактов, вытекающих из законов электричества. Если нам задано распределение зарядов qa, можно найти электрическое поле Ев, порождаемое этими зарядами в точке Р. Другое распределение зарядов qbпорождает в этой же точке поле Eb. Оба эти распределения, действуя вместе, породят в точке Р поле Е, которое представляет собой сумму полей Еа и Еb. Иначе говоря, поле, соответствующее совокупности многих зарядов,— это векторная сумма полей, соответствующих отдельным зарядам. Аналогия с предыдущим примером бросается в глаза: ведь если мы знаем результат действия отдельных сил, то отклик на силу, являющуюся суммой этих сил, будет суммой отдельных откликов.
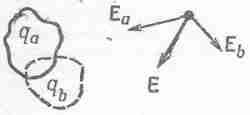
Фиг. 25.2. Принцип суперпозиции в электростатике.
Причина справедливости принципа суперпозиции в электричестве состоит в том, что основные законы электричества, определяющие электрическое поле (уравнения Максвелле), — это линейные дифференциальные уравнения, обладающие свойством (25.3). Силам в этих уравнениях соответствуют заряды, порождающие электрическое поле, а уравнения, определяющие электрическое поле по заданным зарядам,— линейные уравнения.
Чтобы придумать еще один пример принципа суперпозиции, спросите себя, как вам удается настроить свой радиоприемник на определенную радиостанцию, хотя одновременно работает очень много станций. Сигналы радиостанций — это колеблющиеся электрические поля очень высокой частоты, действующие на антенну радиоприемника. Амплитуда этих колебаний, правда, меняется, их модулирует голос диктора, но скорость этих изменений очень мала и об этом можно пока забыть. Когда вы слышите: «Станция работает на частоте 780 килогерц», это значит, что частота излучаемого антенной радиостанции электромагнитного поля равна 780 000 колебаний в секунду и это поле с точно такой же частотой раскачивает электроны в антенне вашего приемника. Но ведь в то же самое время поблизости может работать и другая радиостанция на другой частоте, скажем на частоте 550 кгц. Эта станция тоже раскачивает электроны вашей антенны. Как же отделяются сигналы, поступающие в приемник с частотой 780 кгц, от сигналов, имеющих частоту 550 кгц? Ведь вы же не слышали голоса обоих дикторов одновременно.
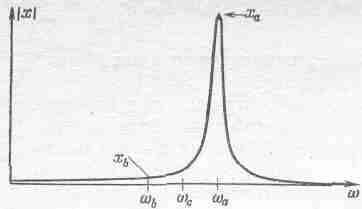
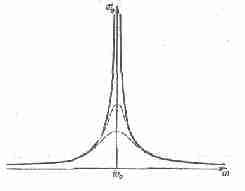
Первая часть электрической цепи радиоприемника — это линейная цепь. По принципу суперпозиции ее отклик на электрическое поле Fа+Fbравен ха+хb. По всему выходит, что нам придется слушать обоих дикторов сразу. Но вспомним, что в резонансной цепи кривая отклика х на единичную силу Fзависит от частоты примерно так, как это изображено на фиг. 25.3.
Фиг. 25.3. Резонансная кривая с острым максимумом.
В цепи с очень большим значением Q отклик имеет очень острый максимум. Предположим, что обе станции имеют примерно одинаковую мощность, поэтому обе силы имеют примерно одинаковую амплитуду. Отклик равен сумме откликов хаи хb, но на фиг. 25.3 хагромаден, а хbочень мал. Таким образом, хотя оба сигнала одинаковы по силе, в приемнике они проходят через остро резонансную цепь, настроенную на частоту wа (частоту передач одной из станций), и отклик на эту частоту (станцию) значительно больше отклика на все остальные. Поэтому, несмотря на то что на антенну действуют оба сигнала, полный отклик почти целиком составлен из частоты wа, и мы можем выбрать ту станцию, какую пожелаем.
Несколько слов о механизме настройки. Как мы настраиваем радиоприемник? Мы изменяли частоту w0, меняя L или С цепи, потому что частота цепи зависит от комбинации L и С. Большинство радиоприемников устроено так, что в них меняется значение С. Поворачивая ручку настройки приемника, мы изменяем собственную частоту цепи. Пусть какому-то положению ручки соответствует частота wс; если нет радиостанций, работающих на этой частоте, приемник молчит. Вы продолжаете изменять емкость С цепи, пока не построите кривую отклика с резонансом при частоте wb, тогда вы услышите другую станцию. Вот так и настраивается радиоприемник; все дело в принципе суперпозиции, в сочетании с резонансным откликом.
Чтоб закончить обсуждение, давайте подумаем, как поступить при анализе линейных задач с заданной силой, когда сила очень сложно зависит от времени. Можно поступать по-разному, но есть два особенно удобных общих метода решения таких задач. Первый метод: предположим, что мы можем решить задачу в некоторых частных случаях, например в случае синусоидальных сил разных частот. Решать линейные уравнения в таких случаях — детская забава. Пусть нам и встретился этот «детский» случай. Теперь встает вопрос, нельзя ли представить любую силу в виде суммы двух или более «детских» сил? Мы уже показали на фиг. 25.1 довольно хитрую зависимость силы от времени; если туда добавить еще несколько синусоид, то результирующая кривая будет выглядеть еще сложнее. Таким образом, простенькие «детские» силы могут породить очень сложную силу. Верно и обратное: практически каждая кривая может быть представлена в виде бесконечной суммы синусоидальных волн разной длины волн (или частоты). Таким образом, мы знаем, как представить заданную силу Fв виде синусоидальных волн, поэтому решение х можно представить в виде суммы F синусоидальных волн, каждая из которых умножается на эффективное отношение х к F.Такой метод решения называют методом преобразования, Фурье, или анализом (разложением) Фурье. Мы не будем сейчас делать такого разложения; пока достаточно только идеи.
Очень интересен другой способ решения сложных задач. Предположим, что кто-то после больших умственных усилий решил заданную нам задачу в случае одной частной силы — импульсной. Сила внезапно и быстро действует на систему, затем выключается и все опять спокойно. Нам теперь достаточно решить такую задачу лишь в случае единичной силы, потом умножением на подходящее число мы сможем получить любые силы. Мы знаем, что осциллятор откликается на импульсную силу затухающими колебаниями. А как быть в случае другой силы, например силы, изображенной на фиг. 25.4?
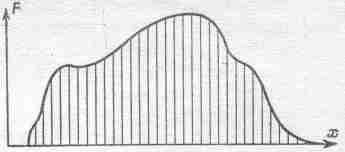
Фиг. 25.4. Сложную силу можно представить как последовательность коротких импульсов.
Такую силу можно представить в виде последовательных ударов молотком. Сначала всюду стоит тишина, потом кто-то берет в руки молоток и внезапно раздаются равномерные удары — удар, удар, удар, удар, ... и опять все тихо. Иначе говоря, непрерывно действующую силу можно представить в виде ряда последовательных импульсов, быстро следующих один за другим. Мы знаем последствия одного импульса, а последствием серии импульсов будет ряд затухающих колебаний; нарисуйте кривую колебаний для первого импульса, затем, немного отступя, такие же кривые для второго импульса, третьего и т. д. Потом сложите все кривые. Таким образом математически можно представить полное решение в случае произвольной силы, если можно решить задачу для импульса. Ответ для любой силы можно получить путем интегрирования. Это метод функции Грина. Функция Грина — это отклик системы на отдельный импульс, а метод функции Грина — это метод анализа действия силы суммированием откликов на импульсы.
Физические принципы, лежащие в основе обоих методов, очень просты; они просто напрашиваются, если понять смысл линейного уравнения, но математические методы содержат довольно сложные интегрирования и т. д.; мы мало подготовлены, чтобы прямо атаковать эти методы. К этому вы еще вернетесь, когда поднабьете руку в математике. Но сама идея методов, право, очень проста.
Наконец, скажем еще, почему линейные системы так важны. Ответ прост: потому что мы умеем решать линейные уравнения! Поэтому большую часть времени мы будем решать линейные задачи. Вторая (и главная) причина заключается в том, что основные законы физики часто линейны. Например, уравнения Максвелла для законов электромагнетизма — линейные уравнения. Великие законы квантовой механики, насколько нам они известны, тоже сводятся к линейным уравнениям. Вот почему мы так много времени уделяем линейным уравнениям: если мы поняли линейные уравнения, мы готовы в принципе понимать очень многие вещи.
Упомянем еще другие ситуации, когда возникают линейные уравнения. Когда отклонения малы, многие функции можно приближенно заменить линейными. Например, точное уравнение движения маятника гласит
d2q/dt2=-g/Lsinq. (25.9)
Это уравнение решается при помощи эллиптических функций, но легче его решить численно, как мы это делали в гл. 9 (вып. 1) при изучении ньютоновых законов движения. Большинство нелинейных уравнений вообще можно решить лишь численно. Для малых углов sinq практически равен q, и в этом случае можно перейти к линейному уравнению. На этом примере можно сообразить, что есть много обстоятельств, при которых малые эффекты линейны (здесь это отклонения маятника на малые углы). Другой пример: если на пружине качается небольшой грузик, сила пропорциональна растяжению пружины. Если сильно потянуть за пружину, она может и порваться, значит, в этом случае сила совсем иначе зависит от расстояния! Линейные уравнения очень важны. Они настолько важны, что физики и инженеры, пожалуй, половину своего времени тратят на решение линейных уравнений.
§ 3. Колебания в линейных системах
Давайте вспомним, о чем мы говорили в нескольких последних главах. Физику колебательных движений очень легко затемнить математикой. На самом-то деле здесь физика очень проста, и если на минуту забыть математику, то мы увидим, что понимаем почти все, что происходит в колебательной системе.
Во-первых, если мы имеем дело только с пружинкой и грузиком, то легко понять, почему система колеблется — это следствие инерции. Мы оттянули массу вниз, а сила тянет ее назад; наступает момент, когда сила равна нулю, но грузик не может остановиться мгновенно: у него есть импульс, который заставляет его двигаться. Теперь пружинка тянет грузик в другую сторону, грузик начинает двигаться взад и вперед. Итак, если бы не было трения, то, несомненно, получилось бы колебательное движение, и так оно и есть на самом деле. Но достаточно незначительного трения, чтобы размах следующих колебаний стал меньше, чем раньше.
Что случится потом, после многих циклов? Это зависит от характера и величины трения. Предположим, что мы придумали такое устройство, что при изменении амплитуды сила трения оказывается пропорциональной другим силам — инерции и натяжению. Иначе говоря, при малых колебаниях трение слабее, чем при колебаниях с большой амплитудой. Обычно сила трения таким свойством не обладает, так что можно предположить, что в нашем случае действуют силы трения особого рода — силы, пропорциональные скорости; тогда для больших колебаний эти силы будут больше, а для малых — меньше. Если у нас именно такой вид трения, то в конце каждого цикла система будет находиться в тех же условиях, что и в начале цикла, только всего будет меньше. Все силы будут меньше в тех же пропорциях: сила пружинки немного ослабнет, инерциальные эффекты будут меньше. Ведь теперь и ускорения грузика будут меньше, и сила трения ослабеет (об этом мы позаботились, создавая наше устройство). Если бы мы имели дело с такими силами трения, то увидели бы, что каждое колебание в точности повторяет первое, только амплитуда его стала меньше. Если после первого цикла амплитуда составляла, например, 90% первоначальной, то после второго цикла она будет равна 90% от 90% и т. д., т. е. размах колебаний после каждого цикла уменьшается в одинаковое число раз. Кривая, ведущая себя таким образом,— это экспоненциальная функция. Она изменяется в одинаковое число раз на любых интервалах одинаковой длины. Иначе говоря, если отношение амплитуды одного цикла к амплитуде предыдущего равно а, то такое же отношение для второго цикла равно а2, затем а3 и т. д. Таким образом, амплитуда колебаний после nциклов равна
А=А0аn. (25.10)
Но, конечно, n~t, поэтому общее решение будет произведением какой-нибудь периодической функции sinwt или соswt на амплитуду, которая ведет себя примерно как bt. Если bположительно и меньше единицы, то его можно записать в виде е-c.
Вот почему решение задачи о колебаниях при учете трения будет выглядеть примерно как
ехр(-ct)coswt. Это очень просто.
Что случится, если трение не будет таким искусственным; например обычное трение о стол, когда сила трения постоянна по величине, не зависит от размаха колебаний и меняет свое направление каждые полпериода? Тогда уравнения движения станут нелинейными; решить их трудно, поэтому придется прибегнуть к описанному в гл. 2 численному решению или рассматривать по отдельности каждую половину периода. Самым мощным, конечно, является численный метод; с его помощью можно решить любое уравнение. Математический анализ используется лишь для решения простых задач.
Надо сказать, что математический анализ вообще не такое уж могучее средство исследования; с его помощью можно решить лишь простейшие возможные уравнения. Как только уравнение чуть усложняется, его уже нельзя решить аналитически. Численный же метод, с которым мы познакомились в начале курса, позволяет решить любое уравнение, представляющее физический интерес.
Пойдем дальше. Что можно сказать о резонансной кривой? Как объяснить резонанс? Представим сначала, что трения нет и мы имеем дело с чем-то, что может колебаться само по себе. Если подталкивать маятник каждый раз, когда он пройдет мимо нас, то очень скоро маятник начнет раскачиваться, как сумасшедший. А что случится, если мы закроем глаза и, не следя за маятником, начнем толкать его с произвольной частотой, с какой захотим? Иногда наши толчки, попадая не в ритм, будут замедлять маятник. Но когда нам посчастливится найти верный темп, каждый толчок будет достигать маятника в нужный момент и он будет подниматься все выше, выше и выше. Таким образом, если не будет трения, то для зависимости амплитуды от частоты внешней силы мы получим кривую, которая выглядит, как сплошная линия на фиг. 25.5.
Фиг. 25.5. Резонансная кривая, отражающая разнообразные виды трения.
Качественно мы поняли резонансную кривую; чтобы найти ее точные очертания, пожалуй, придется прибегнуть к помощи математики. Кривая стремится к бесконечности, если w®w0, где w0— собственная частота осциллятора.
Предположите, что существует слабое трение. Тогда при незначительных отклонениях осциллятора влияние трения сказывается слабо и резонансная кривая вдали от максимума не изменяется. Однако около резонанса кривая уже не уходит в бесконечность, а просто поднимается выше, чем в остальных местах. Когда амплитуда колебаний достигает максимума, работа, совершенная нами в момент толчка, полностью компенсирует потери энергии на трение за период. Таким образом, вершина кривой закруглена, и она уже не уходит в бесконечность. Чем больше трение, тем больше сглажена вершина кривой. Кто-нибудь может сказать: «Я думал, что ширины резонансных кривых зависят от трения». Так можно подумать, потому что резонансные кривые рисуют, принимая за единицу масштаба вершину кривой. Однако если нарисовать все кривые в одном масштабе (это прояснит дело больше, чем изучение математических выражений), то окажется, что трение срезает вершину кривой! Если трение мало, мы можем подняться высоко по резонансной кривой; когда трение сгладит кривую, мы на том же интервале частот поднимаемся на меньшую высоту, и это создает ощущение ширины. Таким образом, чем выше пик кривой, тем ближе к максимуму точки, где высота кривой равна половине максимума.
Наконец, подумаем, что произойдет при очень большом трении. Ясно, что, если трение очень велико, система вообще не осциллирует. Энергии пружинки едва-едва хватит на борьбу с силами трения, и грузик будет медленно ползти к положению равновесия.
§ 4. Аналогии в физике
Продолжая обзор, заметим, что массы и пружинки — это не единственные линейные системы; есть и другие. В частности, существуют электрические системы (их называют линейными цепями), полностью аналогичные механическим системам. Мы не старались до конца выяснить, почему каждая часть электрической цепи работает так, а не иначе; это нам еще трудно понять. Можно просто поверить, что то или иное поведение каждого элемента цепи можно подтвердить экспериментально.
Возьмем для примера простейшее устройство. Приложим к куску проволоки (сопротивлению) разность потенциалов V. Это значит, что если от одного конца проволоки до другого проходит заряд q, то при этом совершается работа qV. Чем выше разность потенциалов, тем большая работа совершается при «падении» заряда с высокопотенциального конца проволоки на низкопотенциальный. Заряды, проходя с одного конца проволоки на другой, выделяют энергию. Но зарядам не так-то просто плыть вдоль проволоки: атомы проволоки оказывают сопротивление потоку, и это сопротивление подчиняется закону, справедливому почти для всех обычных материалов: ток I пропорционален приложенной к проволоке разности потенциалов. Иначе говоря, число зарядов, проходящих через проволоку за 1 сек, пропорционально силе, с которой их толкают:
V=IR=R(dq/dt), (25.11)
Коэффициент R называют сопротивлением, а само уравнение— законом Ома. Единица сопротивления — ом; он равен отношению одного вольта (1 в) к одному амперу (1 а). В механических устройствах очень трудно отыскать силу трения, пропорциональную скорости, а в электрических цепях — это дело обычное и закон Ома справедлив для большинства металлов с очень высокой точностью.
Нас интересует, много ли совершается работы за 1 сек при прохождении зарядов по проволоке (эту же величину можно назвать потерей мощности или выделяемой зарядами энергией)? Чтобы прогнать заряд q через разность потенциалов V, надо совершить работу qV; таким образом, работа за 1 сек равна V(dq/dt), или VI. Это выражение можно записать иначе: IR·I=I2R. Эту величину называют тепловыми потерями; вследствие закона сохранения энергии, такое количество теплоты производит в 1 сек сопротивление проволоки. Эта теплота накаляет проволоку электрической лампы.
У механических устройств есть, конечно, и другие интересные свойства, например, такие, как масса (инерция). В электрических цепях, оказывается, тоже существуют аналоги инерции. Можно построить прибор, называемый индуктором, а свойство, которым он обладает, носит название индуктивность. Ток, попадающий в такой прибор, не хочет останавливаться. Чтобы изменить ток, к этому прибору нужно приложить разность потенциалов. Если по прибору течет постоянный ток, то падения потенциалов нет. Цепи с постоянным током ничего «не знают» об индуктивности; эффекты индуктивности обнаруживаются только при изменениях тока. Описывающее эти эффекты уравнение гласит;
V=L(dI/dt)=L(d2q/dt2), (25.12)
а индуктивность измеряется в единицах, которые называются генри (гн). Приложенная к прибору с индуктивностью в 1 гн разность потенциалов в 1 в изменяет ток на 1 а/сек. Уравнение (25.12), если хотите,— электрический аналог закона Ньютона: V соответствует F, L соответствует т, а I — скорости!
Все последующие уравнения, описывающие обе системы, выводятся одинаково, потому что мы просто можем заменить буквы в уравнении для одной системы и получить уравнение для другой системы; любой вывод, сделанный при изучении одной системы, будет верен и для другой системы.
Какое электрическое устройство соответствует пружинке, в которой сила пропорциональна растяжению? Если начать с F=kx и заменить F на V, a х на q, тополучим V=aq.Мы уже знаем, что такое устройство существует; более того, это единственный из трех элементов цепи, работу которого мы понимаем. Мы уже знакомились с парой параллельных пластинок и обнаружили, что если зарядить пластинки равными, но противоположными по знаку зарядами, то поле между пластинками будет пропорционально величине заряда. Работа, совершаемая при переносе единичного заряда через щель от одной пластинки к другой, прямо пропорциональна заряду пластинок. Эта работа служит определением разности потенциалов и равна линейному интегралу электрического поля от одной пластинки к другой. По исторически сложившимся причинам постоянную пропорциональности называют не С, а 1/С, т. е.
V=q/C. (25.13)
Единица емкости называется фарадой (ф); заряд в 1 кулон, помещенный на каждой пластинке конденсатора емкостью в 1 ф, создает разность потенциалов в 1 в. Вот все нужные аналогии. Теперь можно, заменив m на L, q на х и т. д., написать уравнение для резонансной цепи
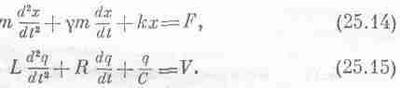
Все, что мы знаем об уравнении (25.14), можно применить и к уравнению (25.15). Переносится каждое следствие; аналогов так много, что с их помощью можно сделать замечательные вещи.
Предположим, что мы натолкнулись на очень сложную механическую систему: имеется не одна масса на пружинке, а много масс на многих пружинках, и все это перепутано. Что нам делать? Решать уравнения? Можно и так. Но попробуем собрать электрическую цепь, которая будет описываться теми же уравнениями, что и механическое устройство! Если мы собрались анализировать движение массы на пружинке, почему бы нам не собрать цепь, в которой индуктивность пропорциональна массе, сопротивление пропорционально тg, 1/С пропорционально k? Тогда электрическая цепь, конечно, будет точным аналогом механического устройства в том смысле, что любой отклик q на V (V соответствует действующей силе) в точности соответствует отклику х на силу! Перепутав в цепи великое множество сопротивлений, индуктивностей и емкостей, можно получить цепь, имитирующую сложнейшую механическую систему. Что в этом хорошего? Каждая задача, механическая или электрическая, столь же трудна (или легка), как и другая: ведь они в точности эквивалентны. Открытие электричества не помогло решить математические уравнения, но дело в том, что всегда легче собрать электрическую цепь и изменять ее параметры.
Предположим, что мы построили автомобиль и хотим узнать, сильно ли его будет трясти на ухабах. Соберем электрическую цепь, в которой индуктивности скажут нам об инерции колес, об упругости колес представление дадут емкости, сопротивления заменят амортизаторы и т. д. В конце концов мы заменим элементами цепи все части автомобиля. Теперь дело за ухабами. Хорошо, подадим на схему напряжение от генератора — он сможет изобразить любой ухаб; измеряя заряд на соответствующем конденсаторе, мы получаем представление о раскачке колеса. Измерив заряд (это сделать легко), мы решим, что автомобиль трясет слишком сильно. Надо что-то сделать. То ли ослабить амортизаторы, то ли усилить их. Неужели придется переделывать автомобиль, снова проверять, как его трясет, а потом снова переделывать? Нет! Просто нужно повернуть ручку сопротивления: сопротивление номер 10 — это амортизатор номер 3; так можно усилить амортизацию. Трясет еще сильнее — не страшно, мы ослабим амортизаторы. Все равно трясет. Изменим упругость пружины (ручка номер 17). Так мы всю наладку произведем с помощью электричества, многократным поворотом ручек.
Вот вам аналоговая вычислительная машина. Так называют устройства, которые имитируют интересующие нас задачи, описываемые теми же уравнениями, но совсем другой природы. Эти устройства легко построить, на них легко провести измерения, отладить их, и... разобрать!
§ 5. Последовательные и параллельные сопротивления
Обсудим, наконец, еще один важный вопрос, хотя он не совсем подходит по теме. Что делать с электрической цепью, если в ней много элементов? Например, когда индуктивность, сопротивление и емкость соединены, как показано на фиг. 24.2 , то все заряды проходят через каждый из трех элементов так, что связывающий элементы ток во всех точках цепи одинаков. Поскольку ток всюду одинаков, падение напряжения на сопротивлении равно IR, на индуктивности равно L(dI/dt) и т. д. Полное падение напряжения получается суммированием частичных падений, и мы приходим к уравнению (25.15). Используя комплексные числа, мы решили это уравнение в случае равновесного отклика на синусоидальную силу. Мы нашли, что V=ZI (Z называется импедансом цепи). Зная импеданс, легко найти ток в цепи I, если к цепи приложено синусоидальное напряжение V.
Предположим, что нужно собрать более сложную цепь из двух кусков, импедансы которых равны Z1 и Z2; соединим их последовательно (фиг. 25.6, а) и приложим напряжение.
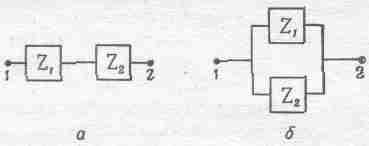
Фиг. 25.6. Импедансы, соединенные последовательно (а) и параллельно (б).
Что случится? Задача немного сложнее предыдущей, но разобраться в ней нетрудно: если через Z1 течет ток I1, то падение напряжения на Z1 равно V1=IZ1, а падение напряжения на Z2 будет V2 = IZ2. Через оба элемента цепи течет одинаковый ток. Полное падение напряжения вдоль такой цепи равно V=V1+V2=(Z1+Z2)I. Таким образом, падение напряжения в такой цепи мощно записать в виде V=IZs, a Zs— импеданс системы, составленной из двух последовательно соединенных элементов, равен сумме импедансов отдельных элементов
Zs=Z1+Z2. (25.16)
Но это не единственный способ решения вопроса. Можно соединить отдельные элементы параллельно (фиг. 25.6,б). При таком соединении, если соединительные провода считать идеальными проводниками, к обоим элементам приложено одинаковое внешнее напряжение, а сила тока в каждом элементе не зависит от другого элемента. Ток через Z1 равенI1=V/Z1, ток в Z2 равен /2=V/Z2. Напряжение в обоих случаях одинаково. Полный ток через концы цепи равен сумме токов в отдельных частях цепи:
I=V/Z1+V/Z2. Это можно записать и так:

Таким образом,
Многие сложные цепи иногда становятся более понятными, если расчленить их на куски, выяснить, чему равны импедансы отдельных частей, а затем шаг за шагом следить за соединением частей, помня о только что выведенных правилах. Если мы собрали цепь из большого числа произвольно соединенных элементов и создаем в этой цепи разности потенциалов при помощи небольших генераторов, импедансом которых можно пренебречь (когда заряд проходит через генератор, то потенциал возрастает на V), то при анализе цепи можно использовать такие правила:
1) сумма токов, протекающих через любое соединение, равна нулю; ведь притекший к любому соединению ток должен обязательно вытечь из него;
2) если заряд, двигаясь по замкнутой петле, вернулся в то место, откуда начал путешествие, полная работа должна быть равна нулю.
Эти правила называются законами Кирхгофа. Систематическое применение этих правил часто облегчает анализ работы сложных цепей. Мы к ним вернемся, когда будем говорить о законах электричества.
* В новейших супергетеродинных приемниках дело, конечно, обстоит сложнее. Усилители приемника настроены на определенную промежуточную частоту; осциллятор с переменной настраивающейся частотой связан с входным сигналом нелинейной связью, порождая новую частоту (равную разности частот сигнала и осциллятора) —промежуточную частоту, которая и усиливается. Об этом мы поговорим в гл. 50 (вып. 4).
* Решения, которые нельзя выразить линейно одно через другое, называются независимыми решениями.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Глава 8 ДРУГИЕ СИСТЕМЫ С ДВУМЯ состояниями
Глава 8 ДРУГИЕ СИСТЕМЫ С ДВУМЯ состояниями § 1. Молекулярный ион водорода§ 2. Ядерные силы§ 3. Молекула водорода§ 4.Молекула бензола § 5. Красители§ 6.Гамильтониан частицы со спином 1/2 в магнитном поле§ 7.Вращающийся электрон в магнитном поле§ 1. Молекулярный ион водородаВ
1. Системы и их классификация
1. Системы и их классификация Система – тело или несколько тел, находящихся во взаимодействии между собой (диффузия, теплообмен, химическая реакция) и отделенных от окружающей среды.Состояние системы в термодинамике определяется с помощью набора переменных, называемых
2. Однокомпонентные системы
2. Однокомпонентные системы Пример такой системы – диаграмма состояния воды. В такой системе тройную точку О, координаты которой определяют условия сосуществования трех фаз: лед, вода, пар, – можно рассматривать как геометрический образ с нулевым числом измерений. Число
7. Кибернетические системы
7. Кибернетические системы Кибернетической системой называют упорядоченную совокупность объектов (элементов системы), взаимодействующих и взаимосвязанных между собой, которые способны воспринимать, запоминать и перерабатывать информацию, а также обмениваться ею.
6. Менисковый телескоп системы Д. Д. Максутова
6. Менисковый телескоп системы Д. Д. Максутова Примерно в сороковых годах нашего века арсенал древней науки пополнился еще одним новым типом телескопов. Советский оптик член-корреспондент Академии наук СССР Д. Д. Максутов предложил заменить линзу Шмидта, имеющую
65. Где границы Солнечной системы?
65. Где границы Солнечной системы? У Солнечной системы нет четко определенного края. Это как спрашивать: где край Скалистых гор?Если Солнечную систему определять только как Солнце и планеты, край находится в 4,5 млрд км от Солнца (расстояние до Нептуна). Однако Солнечная
Глава 2 Малые тела Солнечной системы
Глава 2 Малые тела Солнечной системы …Я помню иногда Угасший метеор в пустынях мирозданья, Седой кристалл в сверкающей пыли… М. Волошин 2.1. Классификация малых тел Солнечной системы О, пыль миров! О, рой священных пчел! Я исследил, измерил, взвесил, счел, Дал имена,
6.5. Российские информационные системы для работы с орбитальными и физическими характеристиками малых тел Солнечной системы
6.5. Российские информационные системы для работы с орбитальными и физическими характеристиками малых тел Солнечной системы Как уже отмечалось в этой и предыдущих главах, количество открываемых объектов, сближающихся с Землей, быстро растет. С введением в строй новых
Системы мира (от древних до Ньютона)
Системы мира (от древних до Ньютона) „Наука потому и называется наукой, что она не признает фетишей, не боится поднять руку на отживающее, старое, и чутко прислушивается к голосу опыта, практики. Если бы дело обстояло иначе, у нас не было бы вообще науки, не было скажем
VIII. ВИДЫ ГЕОЦЕНТРИЧЕСКОЙ СИСТЕМЫ
VIII. ВИДЫ ГЕОЦЕНТРИЧЕСКОЙ СИСТЕМЫ Мы видели, что система Филолая заключает в себе представление о движении Земли вокруг центрального огня и вокруг своей оси. Но вращение Земли считается происходящим вокруг оси, которая перпендикулярна к плоскости ее суточного
XV. ОСОБЕННОСТИ КОПЕРНИКОВОЙ СИСТЕМЫ
XV. ОСОБЕННОСТИ КОПЕРНИКОВОЙ СИСТЕМЫ Несмотря на все свои значительные преимущества, гелиоцентрическая система Коперника в том виде, как она выразилась в его сочинении, заключала в себе значительные астрономические погрешности. Эти недостатки вызваны были тем, что
Измерительные системы
Измерительные системы Свет используется для измерений во многих случаях. Это системы различных интерферометров, позволяющие измерять малые перемещения, контроль поверхности, с высокой точностью порядка длины волны света.Область оптических, бесконтактных,