Глава 21 ГАРМОНИЧЕСКИЙ ОСЦИЛЛЯТОР
Глава 21
ГАРМОНИЧЕСКИЙ ОСЦИЛЛЯТОР
§ 1. Линейные дифференциальные уравнения
§ 2. Гармонический осциллятор
§ 3. Гармоническое движение и движение по окружности
§ 4. Начальные условия
§ 5. Колебания под действием внешней силы
§ 1. Линейные дифференциальные уравнения
Обычно физику как науку делят на несколько разделов: механику, электричество и г. п., и мы «проходим» эти разделы один за другим. Сейчас, например, мы «проходим» в основном механику. Но то и дело происходят странные вещи: переходя к новым разделам физики и даже к другим наукам, мы сталкиваемся с уравнениями, почти не отличающимися от уже изученных нами ранее. Таким образом, многие явления имеют аналогию в совсем других областях науки. Простейший пример: распространение звуковых волн во многом похоже на распространение световых волн. Если мы достаточно подробно изучим акустику, то обнаружим потом, что «прошли» довольно большую часть оптики. Таким образом, изучение явлений в одной области физики может оказаться полезным при изучении других ее разделов. Хорошо с самого начала предвидеть такое возможное «расширение рамок раздела», иначе могут возникнуть недоумения, почему мы тратим столько времени и сил на изучение небольшой задачи механики.

Гармонический осциллятор, к изучению которого мы сейчас переходим, будет встречаться нам почти всюду; хотя мы начнем с чисто механических примеров грузика на пружинке, малых отклонений маятника или каких-то других механических устройств, на самом деле мы будем изучать некое дифференциальное уравнение. Это уравнение непрестанно встречается в физике и в других науках и фактически описывает столь многие явления, что, право же, стоит того, чтобы изучить его получше. Такое уравнение описывает колебания грузика на пружинке, колебания заряда, текущего взад и вперед по электрической цепи, колебания камертона, порождающие звуковые волны, аналогичные колебания электронов в атоме, порождающие световые волны. Добавьте сюда уравнения, описывающие действия регуляторов, например поддерживающих заданную температуру термостата, сложные взаимодействия в химических реакциях и (уже совсем неожиданно) уравнения, относящиеся к росту колонии бактерий, которых одновременно и кормят и травят ядом, или к размножению лис, питающихся кроликами, которые в свою очередь едят траву, и т. д. Мы привели очень неполный список явлений, которые описываются почти теми же уравнениями, что и механический осциллятор. Эти уравнения называются линейными дифференциальными уравнениями с постоянными коэффициентами. Это уравнения, состоящие из суммы нескольких членов, каждый из которых представляет собой производную зависимой величины по независимой, умноженную на постоянный коэффициент. Таким образом,
называется линейным дифференциальным уравнением n-го порядка с постоянными коэффициентами (все аn — постоянные).
§ 2. Гармонический осциллятор
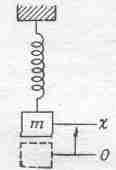
Пожалуй, простейшей механической системой, движение которой описывается линейным дифференциальным уравнением с постоянными коэффициентами, является масса на пружинке. После того как к пружинке подвесят грузик, она немного растянется, чтобы уравновесить силу тяжести. Проследим теперь за вертикальными отклонениями массы от положения равновесия (фиг. 21.1).
Фиг. 21.1. Грузик, подвешенный на пружинке.
Простой пример гармонического осциллятора.
Отклонения вверх от положения равновесия мы обозначим через х и предположим, что имеем дело с абсолютно упругой пружиной. В этом случае противодействующие растяжению силы прямо пропорциональны растяжению. Это означает, что сила равна -kx (знак минус напоминает нам, что сила противодействует смещениям). Таким образом, умноженное на массу ускорение должно быть равно -kx
m(d2x/dt2)=-kx. (21.2)
Для простоты предположим, что вышло так (или мы нужным образом изменили систему единиц), что k/m = 1. Нам предстоит решить уравнение
d2x/dt2=-x. (21.3)
После этого мы вернемся к уравнению (21.2), в котором k и m содержатся явно.
Мы уже сталкивались с уравнением (21.3), когда только начинали изучать механику. Мы решили его численно [см. вып. 1, уравнение (9.12)], чтобы найти движение. Численным интегрированием мы нашли кривую (см. фиг. 9.4, вып. 1), которая показывает, что если частица mв начальный момент выведена из равновесия, но покоится, то она возвращается к положению равновесия. Мы не следили за частицей после того, как она достигла положения равновесия, но ясно, что она на этом не остановится, а будет колебаться (осциллировать). При численном интегрировании мы нашли время возврата в точку равновесия: t=1,570. Продолжительность полного цикла в четыре раза больше: t0=6,28 «сек». Все это мы нашли численным интегрированием, потому что лучше решать не умели. Но математики дали в наше распоряжение некую функцию, которая, если ее продифференцировать дважды, переходит в себя, умножившись на -1. (Можно, конечно, заняться прямым вычислением таких функций, но это много труднее, чем просто узнать ответ.)
Эта функция есть: x=cost. Продифференцируем ее: dx/dt=-sint, a d2x/dt2 =-wt=-x. В начальный момент t=0, x=1, а начальная скорость равна нулю; это как раз те предположения, которые мы делали при численном интегрировании. Теперь, зная, что x=cost, найдем точное значение времени, при котором z=0. Ответ: t=p/2, или 1,57108. Мы ошиблись раньше в последнем знаке, потому что численное интегрирование было приближенным, но ошибка очень мала!
Чтобы продвинуться дальше, вернемся к системе единиц, где время измеряется в настоящих секундах. Что будет решением в этом случае? Может быть, мы учтем постоянные k и т, умножив на соответствующий множитель cost? Попробуем. Пусть x=Acost, тогда dx/dt=-Asint и d2t/dt2=-Acost=-x. К нашему огорчению, мы не преуспели в решении уравнения (21.2), а снова вернулись к (21.3). Зато мы открыли важнейшее свойство линейных дифференциальных уравнений: если умножить решение уравнения на постоянную, то мы снова получим решение. Математически ясно — почему. Если х есть решение уравнения, то после умножения обеих частей уравнения на А производные тоже умножатся на A и поэтому Ах так же хорошо удовлетворит уравнению, как и х. Послушаем, что скажет по этому поводу физик. Если грузик растянет пружинку вдвое больше прежнего, то вдвое возрастет сила, вдвое возрастет ускорение, в два раза больше прежней будет приобретенная скорость и за то же самое время грузик пройдет вдвое большее расстояние. Но это вдвое большее расстояние — как раз то самое расстояние, которое надо пройти грузику до положения равновесия. Таким образом, чтобы достичь равновесия, требуется столько же времени и оно не зависит от начального смещения. Иначе говоря, если движение описывается линейным уравнением, то независимо от «силы» оно будет развиваться во времени одинаковым образом.
Ошибка пошла нам на пользу — мы узнали, что, умножив решение на постоянную, мы получим решение прежнего уравнения. После нескольких проб и ошибок можно прийти к мысли, что вместо манипуляций с х надо изменить шкалу времени. Иначе говоря, уравнение (21.2) должно иметь решение вида
x=cosw0t. (21.4)
(Здесь w0 — вовсе не угловая скорость вращающегося тела, но нам не хватит всех алфавитов, если каждую величину обозначать особой буквой.) Мы снабдили здесь w индексом 0, потому что нам предстоит встретить еще много всяких омег: запомним, что w0 соответствует естественному движению осциллятора. Попытка использовать (21.4) в качестве решения более успешна, потому что dx/dt=-(w0sinw0t и d2x/dt2=-w20wsw0t=-w20x. Наконец-то мы решили то уравнение, которое и хотели решить. Это уравнение совпадает с (21.2), если w20=k/m.

Теперь нужно понять физический смысл w0. Мы знаем, что косинус «повторяется» после того, как угол изменится на 2я. Поэтому x=cosw0t будет периодическим движением; полный цикл этого движения соответствует изменению «угла» на 2p. Величину w0t часто называют фазой движения. Чтобы изменить w0t на 2p, нужно изменить t на t0 (период полного колебания); конечно, t0находится из уравнения w0t0=2p. Это значит, что w0t0 нужно вычислять для одного цикла, и все будет повторяться, если увеличить t на t0; в этом случае мы увеличим фазу на 2p. Таким образом,
Значит, чем тяжелее грузик, тем медленнее пружинка будет колебаться взад и вперед. Инерция в этом случае будет больше, и если сила не изменится, то ей понадобится большее время для разгона и торможения груза. Если же взять пружинку пожестче, то движение должно происходить быстрее; и в самом деле, период уменьшается с увеличением жесткости пружины.
Заметим теперь, что период колебаний массы на пружинке не зависит от того, как колебания начинаются. Для пружинки как будто безразлично, насколько мы ее растянем. Уравнение движения (21.2) определяет период колебаний, но ничего не говорит об амплитуде колебания. Амплитуду колебания, конечно, определить можно, и мы сейчас займемся этим, но для этого надо задать начальные условия.
Дело в том, что мы еще не нашли самого общего решения уравнения (21.2). Имеется несколько видов решений. Решение x=acosw0t соответствует случаю, когда в начальный момент пружинка растянута, а скорость ее равна нулю. Можно иначе заставить пружинку двигаться, например улучить момент, когда уравновешенная пружинка покоится (х=0), и резко ударить по грузику; это будет означать, что в момент t=0 пружинке сообщена какая-то скорость. Такому движению будет соответствовать другое решение (21.2) — косинус нужно заменить на синус. Бросим в косинус еще один камень: если x=cosw0t—решение, то, войдя в комнату, где качается пружинка, в тот момент (назовем его «t=0»), когда грузик проходит через положение равновесия (x=0), мы будем вынуждены заменить это решение другим. Следовательно, x=cosw0t не может быть общим решением; общее решение должно допускать, так сказать, перемещение начала отсчета времени. Таким свойством обладает, например, решение x=acosw0(t-t1), где t1 — какая-то постоянная. Далее, можно разложить
cos(w0t+D)=cosw0tcosD-sinw0tsinD и записать
x=Acosw0t+Вsinw0t,
где A=acosD и В=-asinD. Каждую из этих форм можно использовать для записи общего решения (21.2): любое из существующих в мире решений дифференциального уравнения
d2x/dt2 =-w20x можно записать в виде
x=acosw0(t-t1), (21.6а)
или
x=acos(w0t+D), (21.6б)
или
х=Acosw0t+B sinw0t. (21.6в)
Некоторые из встречающихся в (21.6) величин имеют названия: w0 называют угловой частотой; это число радианов, на которое фаза изменяется за 1 сек. Она определяется дифференциальным уравнением. Другие величины уравнением не определяются, а зависят от начальных условий. Постоянная а служит мерой максимального отклонения груза и называется амплитудой колебания. Постоянную D иногда называют фазой колебания, но здесь возможны недоразумения, потому что другие называют фазой w0t+D и говорят, что фаза зависит от времени. Можно сказать, что D — это сдвиг фазы по сравнению с некоторой, принимаемой за нуль. Не будем спорить о словах. Разным D соответствуют движения с разными фазами. Вот это верно, а называть ли D фазой или нет — уже другой вопрос.
§ 3. Гармоническое движение и движение по окружности
Косинус в решении уравнения (21.2) наводит на мысль, что гармоническое движение имеет какое-то отношение к движению по окружности. Это сравнение, конечно, искусственное, потому что в линейном движении неоткуда взяться окружности: грузик движется строго вверх и вниз. Можно оправдаться тем, что мы уже решили уравнение гармонического движения, когда изучали механику движения по окружности. Если частица движется по окружности с постоянной скоростью v, то радиус-вектор из центра окружности к частице поворачивается на угол, величина которого пропорциональна времени. Обозначим этот угол q=vt/R (фиг. 21.2).
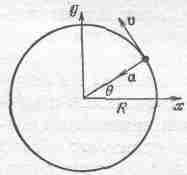
Фиг. 21.2. Частица, движущаяся по кругу с постоянной скоростью.
Тогда dq/dt=w0=v/R. Известно, что ускорение а=v2/R=w20R и направлено к центру. Координаты движущейся точки в заданный момент равны
х=Rcosq, y=Rsinq.
Что можно сказать об ускорении? Чему равна x-составляющая ускорения, d2x/dt2. Найти эту величину можно чисто геометрически: она равна величине ускорения, умноженной на косинус угла проекции; перед полученным выражением надо поставить знак минус, потому что ускорение направлено к центру:
ах=-acosq=-wRcosq=-w20х. (21.7)
Иными словами, когда частица движется по окружности, горизонтальная составляющая движения имеет ускорение, пропорциональное горизонтальному смещению от центра. Конечно, мы знаем решения для случая движения по окружности: x=Rcosw0t. Уравнение (21.7) не содержит радиуса окружности; оно одинаково при движении по любой окружности при одинаковой w0.
Таким образом, имеется несколько причин, по которым следует ожидать, что отклонение грузика на пружинке окажется пропорциональным cosw0t и движение будет выглядеть так, как если бы мы следили за x-координатой частицы, движущейся по окружности с угловой скоростью w0 . Проверить это можно, поставив опыт, чтобы показать, что движение грузика вверх-вниз на пружинке в точности соответствует движению точки по окружности. На фиг. 21.3 свет дуговой лампы проектирует на экран тени движущихся рядом воткнутой во вращающийся диск иголки и вертикально колеблющегося груза.
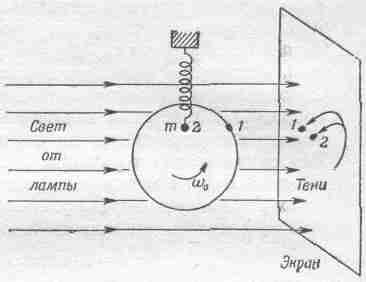
Фиг. 21.3. Демонстрация эквивалентности простого гармонического движения и равномерного движения по окружности.
Если вовремя и с нужного места заставить грузик колебаться, а потом осторожно подобрать скорость движения диска так, чтобы частоты их движений совпали, тени на экране будут точно следовать одна за другой. Вот еще способ убедиться в том, что, находя численное решение, мы почти вплотную подошли к косинусу.
Здесь можно подчеркнуть, что поскольку математика равномерного движения по окружности очень сходна с математикой колебательного движения вверх-вниз, то анализ колебательных движений очень упростится, если представить это движение как проекцию движения по окружности. Иначе говоря, мы можем дополнить уравнение (21.2), казалось бы, совершенно лишним уравнением для у и рассматривать оба уравнения совместно. Проделав это, мы сведем одномерные колебания к движению по окружности, что избавит нас от решения дифференциального уравнения. Можно сделать еще один трюк — ввести комплексные числа, но об этом в следующей главе.
§ 4. Начальные условия
Давайте выясним, какой смысл имеют А и В или а и D. Конечно, они показывают, как началось движение. Если движение начнется с малого отклонения, мы получим один тип колебаний; если слегка растянуть пружинку, а потом ударить по грузику — другой. Постоянные А и В или а и D, или какие-нибудь две другие постоянные определяются обстоятельствами, при которых началось движение, или, как обычно говорят, начальными условиями. Нужно научиться определять постоянные, исходя из начальных условий. Хотя для этого можно использовать любое из соотношений (21.6), лучше всего иметь дело с (21.6в). Пусть в начальный момент t=0 грузик смещен от положения равновесия на величину х0и имеет скорость v0. Это самая общая ситуация, какую только можно придумать. (Нельзя задать начального ускорения, потому что оно зависит от свойств пружины; мы можем распорядиться только величиной х0.) Вычислим теперь А и В. Начнем с уравнения для
х=Acoswot+Bsinw0t;
поскольку нам понадобится и скорость, продифференцируем х и получим
v=-w0Asinw0t+w0Bcosw0t.
Эти выражения справедливы для всех t, но у нас есть дополнительные сведения о величинах х и v при t=0. Таким образом, если положить t=0, мы должны получить слева х0и v0, ибо это то, во что превращаются х и v при t=0. Кроме того, мы знаем, что косинус нуля равен единице, а синус нуля равен нулю. Следовательно,
х0=А·1+В·0=А
и
vu=-w0A·0+w0B·1=w0B.
Таким образом, в этом частном случае
А=х0, В=v0/w0.
Зная А и В, мы можем, если пожелаем, найти а и D.
Итак, задача о движении осциллятора решена, но есть одна интересная вещь, которую надо проверить. Надо выяснить, сохраняется ли энергия. Если нет сил трения, то энергия должна сохраняться. Сейчас нам удобно использовать формулы
х=acos(wot+D) и v=-w0asin(w0t+D).
Давайте найдем кинетическую энергию Т и потенциальную энергию U. Потенциальная энергия в произвольный момент времени равна 1/2kx2, где х — смещение, a k — постоянная упругости пружинки. Подставляя вместо х написанное выше выражение, найдем
U=1/2kx2=1/2ka2cos2 (w0t+D).
Разумеется, потенциальная энергия зависит от времени; она всегда положительна, это тоже понятно: ведь потенциальная энергия — это энергия пружины, а она изменяется вместе с х. Кинетическая энергия равна 1/2mv2; используя выражение для v, получаем
Т = 1/2mv2=1/2mw20a2sin2(w0t+D).
Кинетическая энергия равна нулю при максимальном х, ибо в этом случае грузик останавливается; когда же грузик проходит положение равновесия (x=0), то кинетическая энергия достигает максимума, потому что именно тогда грузик движется быстрее всего. Изменение кинетической энергии, таким образом, противоположно изменению потенциальной энергии. Полная энергия должна быть постоянной. Действительно, если вспомнить, что k=mw20, то
T+U=1/2mw20а2 [cos2 (w0t+D)+sin2 (w0t+D)] =1/2rnw20a2.
Энергия зависит от квадрата амплитуды: если увеличить амплитуду колебания вдвое, то энергия возрастет вчетверо. Средняя потенциальная энергия равна половине максимальной и, следовательно, половине полной; средняя кинетическая энергия также равна половине полной энергии.
§ 5. Колебания под действием внешней силы
Нам остается рассмотреть колебания гармонического осциллятора под действием внешней силы. Движение в этом случае описывается уравнением
md2x/dt2=-kx+F(t). (21.8)
Давайте подумаем, как будет вести себя грузик при этих обстоятельствах. Внешняя движущая сила может зависеть от времени каким угодно образом. Начнем с простейшей зависимости. Предположим, что сила осциллирует
F(t)=F0coswt. (21.9)
Обратите внимание, что w — это не обязательно w0: будем считать, что можно изменять w, заставляя силу действовать с разной частотой. Итак, надо решить уравнение (21.8) в случае специально подобранной силы (21.9). Каким будет решение (21.8)? Одно из частных решений (общим решением мы еще займемся) выглядит так:
z=Ccoswt, (21.10)
где постоянную С еще надо определить. Иначе говоря, пытаясь найти решение в таком виде, мы предполагаем, что, если тянуть грузик взад и вперед, он в конце концов начнет качаться взад и вперед с частотой действующей силы. Проверим, может ли это быть. Подставив (21.10) в (21.9), получим
—mw2Сcoswt=-mw20Сcoswt+F0coswt. (21.11)

Мы уже заменили k на mw20, потому что удобнее сравнивать две частоты. Уравнение (21.11) можно поделить на содержащийся в каждом члене косинус и убедиться, что при правильно подобранном значении С выражение (21.10) будет решением. Эта величина С должна быть такой:
Таким образом, грузик т колеблется с частотой действующей на него силы, но амплитуда колебания зависит от соотношения между частотой силы и частотой свободного движения осциллятора. Если со очень мала по сравнению с w0, то грузик движется вслед за силой. Если же чересчур быстро менять направление толчков, то грузик начинает двигаться в противоположном по отношению к силе направлении. Это следует из равенства (21.12), которое говорит нам, что величина С отрицательна, если w больше собственной частоты гармонического осциллятора w0. (Мы будем называть w0 собственной частотой гармонического осциллятора, а w — приложенной частотой.) При очень высокой частоте знаменатель становится очень большим и грузик практически не движется.
Найденное нами решение справедливо только в том случае, когда уже установилось равновесие между осциллятором и действующей силой; это происходит после того, как вымрут другие движения. Эти вымирающие движения называют переходным откликом на силу F(t), а движение, описываемое (21.10) и (21.12),— равновесным откликом.
Приглядевшись к формуле (21.12), мы заметим любопытную вещь: если частота со почти равна w0, то С приближается к бесконечности. Таким образом, если настроить силу «в лад» с собственной частотой, отклонения грузика достигнут гигантских размеров. Об этом знает всякий, кому когда-либо приходилось раскачивать ребенка на качелях. Это довольно трудно сделать, если закрыть глаза и беспорядочно толкать качели. Но если найти правильный ритм, то раскачать качели легко, однако, как только мы опять собьемся с ритма, толчки начнут тормозить качели и от такой работы будет мало проку.
Если частота со будет в точности равна w0, то амплитуда должна стать бесконечной, что, разумеется, невозможно. Мы ошиблись, потому что решали не совсем верное уравнение. Составляя уравнение (21.8), мы забыли о силе трения и о многих других силах. Поэтому амплитуда никогда не достигнет бесконечности; пожалуй, пружинка порвется гораздо раньше!
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
ПЕРВЫЕ ПОПЫТКИ ПОЛУЧИТЬ САМО-ДЕИСТВУЮЩИИ ДВИГАТЕЛЬ — МЕХАНИЧЕСКИЙ ОСЦИЛЛЯТОР — РАБОТА ДЮАРА И ЛИНДЕ — ЖИДКИЙ ВОЗДУХ
ПЕРВЫЕ ПОПЫТКИ ПОЛУЧИТЬ САМО-ДЕИСТВУЮЩИИ ДВИГАТЕЛЬ — МЕХАНИЧЕСКИЙ ОСЦИЛЛЯТОР — РАБОТА ДЮАРА И ЛИНДЕ — ЖИДКИЙ ВОЗДУХ Осознав эту истину, я начал изыскивать пути выполнения моей идеи, и после длительных размышлений, я наконец придумал аппарат, который смог бы получать
РАЗВИТИЕ НОВОГО ПРИНЦИПА — ЭЛЕКТРИЧЕСКИЙ ОСЦИЛЛЯТОР — ПРОИЗВЕДЕНИЕ КОЛОССАЛЬНЫХ ЭЛЕКТРИЧЕСКИХ ДВИЖЕНИЙ — ЗЕМЛЯ ОТВЕЧАЕТ ЧЕЛОВЕКУ — МЕЖПЛАНЕТНАЯ СВЯЗЬ ТЕПЕРЬ СТАЛА ВОЗМОЖНОЙ
РАЗВИТИЕ НОВОГО ПРИНЦИПА — ЭЛЕКТРИЧЕСКИЙ ОСЦИЛЛЯТОР — ПРОИЗВЕДЕНИЕ КОЛОССАЛЬНЫХ ЭЛЕКТРИЧЕСКИХ ДВИЖЕНИЙ — ЗЕМЛЯ ОТВЕЧАЕТ ЧЕЛОВЕКУ — МЕЖПЛАНЕТНАЯ СВЯЗЬ ТЕПЕРЬ СТАЛА ВОЗМОЖНОЙ Я решил сконцентрировать свои усилия на этой несколько рискованной задаче, хотя и сулившей
Глава 11
Глава 11 Дверь открылась, и Миртиль застыла на месте. У нее перехватило дыхание. Перед ней стояла такая красивая женщина, какой она еще никогда не видела. Черты г-жи Дрейк были поразительно тонкими: ветерок, овевавший ее прекрасное лицо, и тот, казалось, прикасался к нему с
Глава 12
Глава 12 Г-жа Дрейк сидела напротив принцессы. Ноздри Миртиль щекотал сладковатый запах настоя, курившегося в чашках. Вдыхая ароматы далеких стран, она, никогда не покидавшая Миртильвиль, как будто перенеслась в неведомые края и мчалась по воздуху над огненно-алыми
Глава 14
Глава 14 Незаметно махнув рукой Тому, Тристам занял свое обычное место в последнем ряду. Миртиль бросила беглый взгляд на его руку: вчерашний ожог зажил. Джерри, сидевший рядом с Томом, был вне себя от ярости. Опять этот Тристам дешево отделался! Безобразие! Давно пора
Глава 15
Глава 15 — Мне совсем не хочется идти к директрисе, — сказал Тристам, как только они с Томом оказались в коридоре.— Раньше нужно было думать, — возразил Том. — Теперь ничего не поделаешь. Придется идти!И друзья поплелись к директорскому кабинету. Тристам не замечал, что
Глава 16
Глава 16 Ветер дул все сильнее. Стебли рисовых метелок нещадно хлестали Тома и Тристама, убегавших от преследователей. Обезумев от страха, мальчики думали только о том, чтобы нагнать г-жу Дрейк. До защитного ограждения было уже недалеко. Возле городской черты мать Тристама
Глава 17
Глава 17 Получасом раньше, в тот самый момент, когда в класс Лазурро вбежал полковник, Миртиль поняла, что для их городка наступили последние часы.— Они нас нашли, — твердо сказал полковник. — Они уже здесь. Миртиль, Тристам, идемте со мной, вы должны бежать.Миртиль
Глава 13
Глава 13 Когда в гостиную вошел Том, Тристам сидел на диване. Он повесил мамин кулон себе на шею, заправив кристалл под свитер, и смотрел на портрет Миртиль, лежавший перед ним на низеньком столике. Глаза Тристама блестели, как будто он только что плакал.— Ну и тип! —
Глава 7
Глава 7 — Ты знаешь что-нибудь про аэродинамику? — спросил Вакинг.— Ароэ… что?В наушниках послышался тяжелый вздох Тома, летевшего вместе с Робом. Их машину отделяло от ласточки Вакинга несколько километров.— Это наука о свойствах воздуха, обтекающего самолеты, ракеты
Глава 10
Глава 10 — Все пропало! — воскликнул Том. — Роб не прилетит! Как думаешь, у лейтенанта был план на этот случай?Тристам явно сомневался, но промолчал. Он с отчаянием смотрел, как звенья по десять машин, одно за другим, заходят на посадку. В некоторых, особенно крупных
Глава 13
Глава 13 Внутри жуткого облака было нечем дышать. Густой серый туман ослепил Миртиль и Тристама, порывистый ветер, с каждым мгновением усиливаясь, швырял машину как щепку, и они почти сразу перестали понимать, куда их тащит. Мощь чудовища, в утробе которого они оказались,
Глава 15
Глава 15 Они шли долго, может быть, несколько часов. Тристам молча шагал за Вакингом и Миртиль, улавливая обрывки их разговора. Так, он услышал, что большинство летчиков из Белой Столицы, по мнению лейтенанта, должны были спастись и даже не слишком пострадать: все они были
Глава 16
Глава 16 Они шли по лесу, и Миртиль рассказывала Тристаму обо всем, что с ней приключилось: о встрече с тираном, о тропическом циклоне и о том, какой выбор предложил ей этот человек, не скрывавший своего безумия.— Ты выбрала смерть? — спросил потрясенный Тристам.— Да. И