ПРАВИЛА ПОВЕДЕНИЯ ТОЛПЫ
Коллективное поведение «социальных животных» не ускользнуло от внимания Томаса Гоббса, и он даже предвидел связанные с этим возражения против его теорий, когда с некоторой мрачностью описывал грубость и жесткость человеческого поведения в «естественном состоянии»:
Известно, что некоторые живые существа, такие как пчелы или муравьи, могут жить сообща (именно поэтому Аристотель и называл их политическими созданиями), руководствуясь при этом лишь своими чувствами и стремлениями... так что некоторые люди даже удивляются, почему к этому не способны человеческие сообщества6.
Гоббс далее неоднократно объясняет, что отличие людей от животных состоит в сложности и запутанности человеческих мыслей, желаний или чувств, постоянно создающих конфликты и споры: «Люди постоянно спорят друг с другом из-за вопросов чести и достоинства, которые никогда не возникают у других созданий... лишенных сознания, которые поэтому не замечают ошибок поведения друг друга и не думают об этих ошибках, а продолжают совершать общие действия»7.
Эти идеи до сих пор представляются бесспорными большинству обществоведов, человек был и остается слишком сложным объектом для любого математического моделирования, так как поведение людей регулируется множеством индивидуальных и зачастую неосознанных импульсов. Какими идеальными параметрами описать поведение человека?
Целью любых физических моделей, включая все описанные нами, было и остается получение информации, попросту говоря, вы хотите получить больше, чем вложили. Поэтому, моделируя поведение толпы людей, не стоит закладывать излишне подробную информацию о характере и поступках каждого из них, включая мелкие передвижения и поступки (неожиданно останавливается и смотрит на знак светофора... внимательно разглядывает витрину магазина...). Толку от этого может быть немного, вы получите меньше информации, чем заложили.
В 1971 году Л.Ф. Хендерсон из Сиднейского университета, пытаясь уйти от «болота» индивидуальных характеристик человеческого поведения, предложил применить так называемые статистические характеристики, относящиеся к групповым действиям и поступкам. Такой подход кажется почти очевидным, но его принципы и понятия трудно было четко сформулировать. Например, толпы любителей заполняют стадион, распределяются по своим местам на трибунах, а после окончания игры вытекают из стадиона и исчезают. При этом ни один из зрителей не погружен в свой индивидуальный мир настолько, чтобы сделать невозможными эти коллективные действия. Покупатели на торговой улице двигаются по одному краю тротуара в одну сторону, а по другому — в другую; никто не двигается пешком со скоростью сто километров в час; никто не ходит с закрытыми глазами, натыкаясь на все подряд, и т. д. В отличие от молекул люди не просто двигаются с какой-то скоростью, сталкиваясь друг с другом, а следуют некоторым общим правилам, ограничениям и тенденциям, из чего, естественно, вытекают некоторые усредненные закономерности.
Хендерсон начал поиски статистических характеристик человеческого поведения с сопоставления движения человеческой толпы и молекул газа в кинетической теории, пытаясь оценить, насколько распределение потока людей по тротуару соответствует описанному колоколообразному распределению Максвелла — Больцмана. Он просто стал изучать разнообразные потоки людей в разных ситуациях и обстоятельствах (студенты в кампусе университета Сиднея; пешеходы, пересекающие по переходу оживленную улицу; дети на площадке для игр). Во всех этих системах распределения почти точно совпадали с кривой Максвелла — Больцмана с одним курьезным отличием. В каждом из описанных случаев общую кривую для толпы людей можно было разложить на два четко выраженных пика, демонстрирующих наличие двух различных распределений Максвелла — Больцмана с немного различающимися средними скоростями. Естественно, Хендерсон связал с потоками мужчин и женщин, движущихся в похожей манере, но с разні скоростями.
Он полагал, что обнаруженные закономерности позволяют лучше not изменения «глобального» состояния толпы:
Представьте себе широкий проход, в одном конце которого люди вынуждены замедлять скорость движения, например, из-за того, что они должны там просто пробить проездной билет перед турникетом. Естественно, на этом конце прохода они не только собираются, но и выстраиваются в довольно плотную очередь, где вынуждены двигаться еле-еле, буквально касаясь локтями друг друга. Такое изменение поведения толпы может быть названо фазовым переходом, поскольку мы можем уподобить движение толпы газовому состоянию частиц, а образующуюся в проходе упорядоченную очередь — их плотно упакованному, жидкому состоянию8.
Другими словами, Хендерсон просто предсказал возможность рассл рения фазовых переходов в толпе людей по аналогии со сжижением тг при сжатии, хотя сам он никогда не сообщал о собственных наблюден переходов такого рода.
Строго говоря, работа Хендерсона не содержала ничего сенсационно] лишь подтверждала потенциальную возможность использования статш ческой физики в рассматриваемых задачах, так как нам следовало ожид^ колоколообразного распределения скоростей. Скорее было бы удивителі если бы это предположение не подтвердилось. Не все такие колоколооб] ные кривые математически точно соответствуют распределению Максі ла — Больцмана, но результаты Хендерсона, полученные по наблюдения] движением лишь нескольких сотен движущихся людей, были недостаток для выявления тонких отличий. И в конце концов, разве за много-много до этого Адольф Кетле не установил, что именно эти колоколообраз кривые являются основой социальной статистики?!
Описание поведения толпы Хендерсоном можно назвать «газок* тическим», и с этого начал свои исследования в конце 1980-х годов Д Хелбинг из университета Георга-Августа в Геттингене. Хелбинг исхо из того, что в этом статистическом подходе не учитываются человечес мотивы, заставляющие пешеходов двигаться в определенных направлен с определенной целью, и лишь учет таких факторов может приблизить (J мальный научный метод к описанию реальной толпы и сложных моделе поведения. Действительно, Хендерсон уподоблял движение человечес массы потокам флюида, но нельзя забывать, что этот «флюид» не тол обладает собственным разумом, но и не подчиняется детерминизму Ньн на — человек может умереть, неожиданно убежать куда-то и т. п.
Хелбинг предложил разделить побудительные мотивы человеческого ведения на две группы — внутренние, «личные цели и интересы», и внепі] «восприятие ситуации и окружения». Очевидно, что эти мотивы должны часто вступать в конфликт друг с другом по самым разным причинам. Человек торопится, но ему приходится сдерживать себя, чтобы не натыкаться на медленно прогуливающихся прохожих. Человек хочет пересечь тротуар по диагонали, чтобы войти в магазин, но ему приходится пропустить других граждан. Вообще говоря, в густой толпе действия и движения любого человека достаточно сильно ограничены.
Внешние воздействия на поведение человека весьма похожи на взаимодействия частиц друг с другом. Еще в 1945 году психолог Карен Хорни выделила три основных типа взаимодействия человека с окружающими: «идти к людям», «уходить от людей» и «идти против людей». Понятно, что слово «идти» в данном контексте представляет собой метафору, хотя иногда оно может пониматься и в прямом смысле. Друзья или партнеры часто прогуливаются вместе, как бы стремясь слиться в единое целое, в то время как знаменитости на вечеринках часто стоят с бокалом в руке, как бы притягивая своих поклонников и почитателей личным (или искусственно создаваемым) обаянием, недаром называемым иногда магнетизмом. Легко заметить, что в гуще настоящей толпы люди почти никогда не знают друг друга и не проявляют склонности к образованию кластеров, т. е. совместно движущихся групп. Более того, они обычно стараются держаться подальше от незнакомых людей, что вновь напоминает о силах притяжения и отталкивания. Третий вариант («идти против людей») редко наблюдается среди пешеходов, но под ним Хорни подразумевала скорее социальную позицию, связанную с намеренным нарушением правил, агрессивностью и конфликтностью.
Американский специалист по социальной психологии Курт Левин считал, что предложенная Хорни классификация притягивающих и отталкивающих взаимодействий может быть с полным правом применена к анализу социальных явлений. В 1950-х годах он выдвинул идею об аналогии между электромагнитными силами, действующими между заряженными частицами, и социальным воздействием, определяющим поведение людей. В соответствии с этой теорией «движение» людей следует рассматривать в абстрактном поле идей, верований, привычек и представлений. Это поле возникает в сознании любого человека под воздействием наблюдений за поведением окружающих его лиц, и именно оно заставляет человека совершать определенные поступки или отказываться от них.
Кстати, этот подход очень похож на модернизированный вариант гобб- совского механистического представления о гуманности. Исходя из концепции Левина о «социальных силах», Хелбинг и его коллега Петер Молнар из Штутгартского университета разработали математическую теорию пешеходного движения, основанную на физических законах. Разумеется, все теории «межличностных сил», более того, использование уравнений электромагнетизма и гравитации для их расчета могут выглядеть натяжкой и интеллектуальной спекуляцией, но результаты работы представляют явный интерес.
В модели Хелбинга и Молнара предполагается, что пешеходы движутся в заданном направлении с некоторой определенной скоростью. Их поведение при этом определяется рядом внешних факторов, главным из которых выступает стремление избежать столкновений, что трактуется практически как желание сохранить «личное пространство», т. е. некоторое расстояние между собой и другими пешеходами. Это представляется разумной моделью, так как люди в толпе ведут себя именно так, как если бы между ними действовали силы отталкивания, возрастающие при сближении. Современные теории жидкости часто также используют аналогичное «мягкое» отталкивание между частицами, резко возрастающее на очень малых расстояниях. И теория жидкостей ван дер Ваальса включала представление о жестком отталкивании при соприкосновении двух частиц.
Теория ван дер Ваальса учитывает также и наличие сил притяжения между частицами. В модели Хелбинга и Молнара такие силы вводятся только при изучении некоторых особых ситуаций, например, для оценки возможности формирования групп, но обычно считается, что все виртуальные пешеходы одинаково стараются избежать слишком близкого соседства. В этом отношении они резко отличаются от бойдов и самодвижущихся бактерий Вицека, так как в модель не заложено стремление к согласованию направленности движения, что исключает возможность формирования стай какого-либо вида[57]. Вместо этого придуманные создания (которых, следуя «Бриллиантовым псам» Дэвида Боуи, можно назвать пиплоида- ми — peoploids), образно говоря, пашут только по своей борозде, тщательно избегая нарушений границы с соседними созданиями.
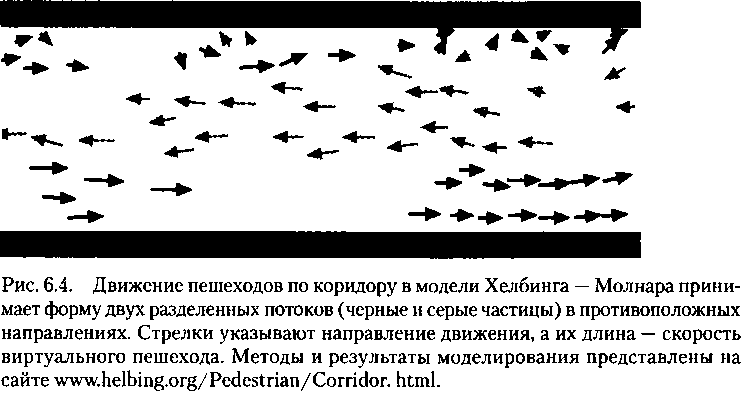
На первый взгляд кажется, что описываемые моделью пиплоиды являются какими-то немыслимыми эгоцентриками, лишенными любых признаков социального поведения, однако компьютерное моделирование вдруг выявило у них некоторые типы групповой динамики и даже признаки «воспитанности». Например, идущие по коридору в разных направлениях пиплоиды неожиданно стали согласовывать свои движения, образуя как бы два встречных потока движения, что сразу позволило избежать множества сложных маневров при встречных столкновениях, что, кстати, весьма похоже на реальную картину движения пешеходов (рис. 6.4). Введение в модель препятствий но оси движения в виде виртуальных колонн или деревьев лишь усилило тенденцию к упорядочению этих потоков, даже без указания предпочтительного направления обхода. «Полосы движения» при этом возникают спонтанно, но выбор направления движения по ним остается случайным[58].
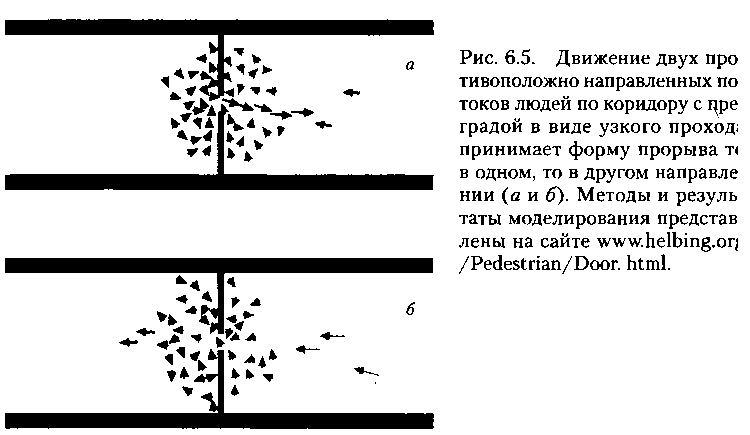
Когда две группы пиплоидов пытаются одновременно пройти в противоположных направлениях через один проход, естественно, возникает «прорыв» то в одном, то в другом направлении (рис. 6.5). Одна из групп «захватывает» дверь на некоторое время (какие-то нахалы в ярких куртках прорываются первыми, а за ними следуют остальные), а вторая ждет, пока этот поток не ослабеет. Разумеется, вежливость тут ни при чем, поскольку пиплоиды второй группы просто стараются избежать слишком тесного сближения с членами первой.
Хелбинг и Кэй Болей смогли затем смоделировать процесс такого обучения и показать, что если виртуальные пешеходы выработали у себя предпочтительное направление обхода, позволяющее лучше избегать столкновений, то они продолжают сохранять этот случайно возникший признак.
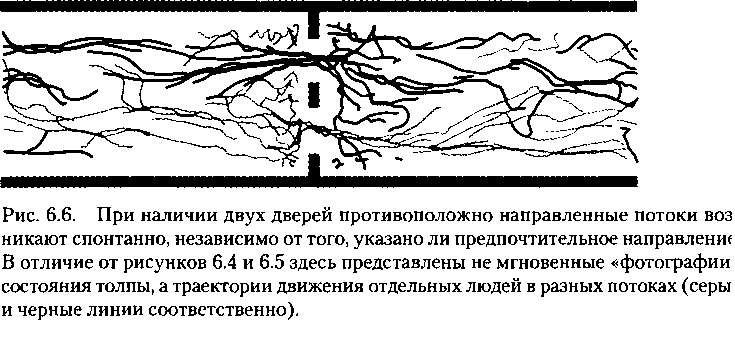
Результаты расчета могут быть использованы для более рациональноп регулирования людских потоков в различных условиях. Например, даже простая установка разделительных колонн приводит к некоторой само организации описываемых потоков. Чаще всего сложность организациі движения оказывается связанной с известной проблемой наиболее узкоп прохода в системе, называемого обычно горлышком бутылки. На первыі взгляд кажется, что простейшим решением является расширение прохода но опыт показывает, что при этом возрастает частота смены «прорывов» поэтому предпочтительнее использовать два узких прохода. Даже в те: случаях, когда предпочтительное направление движения не указано, толп; автоматически организуется в два противоположно направленных поток; (рис. 6.6), так что пропускная способность двух узких дверей оказывается выше, чем у одной, вдвое более широкой.
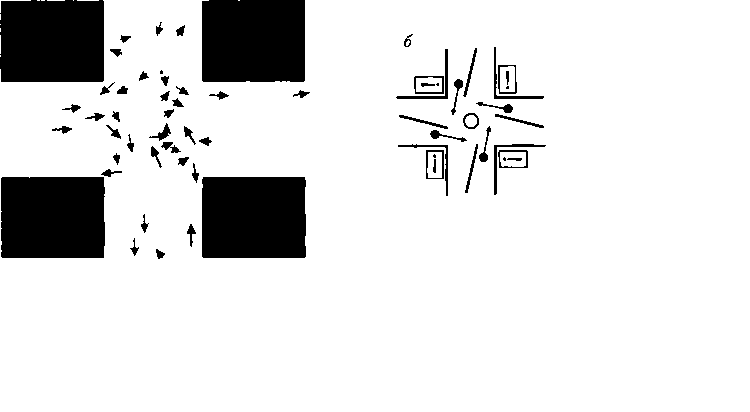
Рис. 6.7. (а) Движение на перекрестке на какое-то время принимает круговой характер, позволяющий снизить число столкновений и «происшествий». Здесь цвет стрелок указывает на различное направление приближения к перекрестку, целью движения является переход на противоположную сторону, (б) Режим движения на перекрестке можно сделать более эффективным, используя барьеры и указатели (знаки! на рисунке).
Значительно сложнее выглядят картины самоорганизации движения на перекрестках. Моделирование показало, что в этом случае вообще не существует стабильного состояния, позволяющего минимизировать число виртуальных столкновений и «уличных заторов», однако часто возникают некоторые временные режимы движения, при которых потоки пиплоидов двигаются по круіу в том или ином направлении (рис. 6.7, а), и этот результат, возможно, стоило бы использовать на практике при планировании пешеходных маршрутов. Например, установка столба в центре перекрестка исключает маршруты, препятствующие круговому движению, а установленные под углом к направлению потоков барьеры стабилизируют круговое движение, особенно при дополнительном применении указателей и т.п. (рис. 6.7, б).
В 1997 году Хелбинг и Молнар вместе с компьютерщиком Иоахимом Кельчем из Тюбингена использовали свою модель для изучения процессов спонтанного формирования маршрутов пешеходных дорожек (тропинок) на открытых городских пространствах (парки и т. п.) в реальных условиях. Известно, что люди обычно стараются пересекать луг или поляну в парке не по прямой, а по уже сформировавшимся тропкам. Механизм этого предпочтения не совсем ясен. Возможно, идти по вытоптанной и утоптанной земле им просто удобнее, чем по траве, хотя не исключено, что человек выбирает путь по тропе, подчиняясь заложенному с детства правилу следовать другим (даже если эти другие ему незнакомы). В любом случае для нашего рассмотрения существенны не причины поведения, а то, что люди поступают именно так.
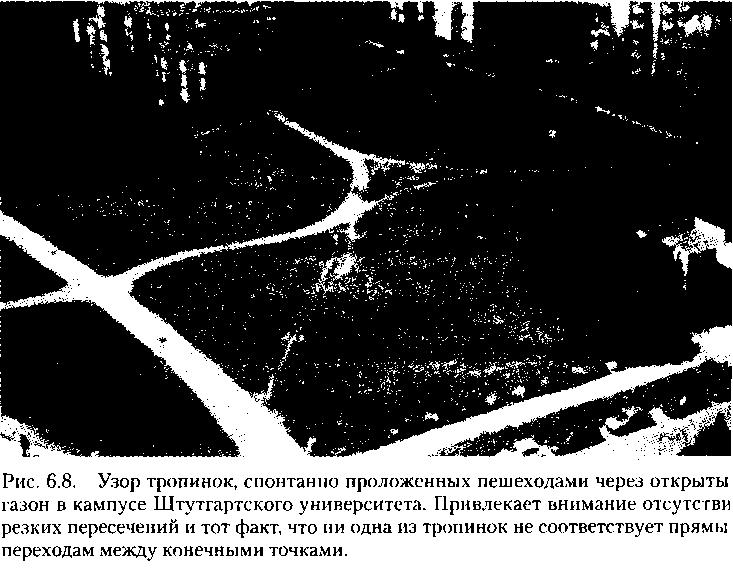
Наиболее интересным является вопрос о возникновении этих тропинок. Представим себе заросшую ровной травкой парковую поляну. Понятно, что самые первые пешеходы[59] имеют полную свободу выбора и передвижения. Реаль ная структура тропинок, изученная Хелбингом и его коллегами, располагалас: в кампусе (студенческом городке) Штутгартского университета, представля; собой сеть из тропинок, пролегающих на обширном газоне между различным! строениями, и имела несколько входов и выходов (рис. 6.8). Примечательно что система тропинок вовсе не соединяет строения прямыми линиями.
Естественно, тропинки формируются на основе следов множества пеше ходов, пересекающих газон. Исследователи ввели в модель желание каждоп из пиплоидов двигаться по маршруту с минимальным количеством густоі травы. При этом, однако, трава продолжает расти с некоторой заданной ско ростью, так что неиспользуемые тропинки быстро зарастают и исчезают, т. с тропинка становится все более отчетливой и удобной по мере ее использова ния. Этот факт побуждает пешеходов выбирать некоторые отрезки тропиноі даже в тех случаях, когда маршрут удлиняется или усложняется.
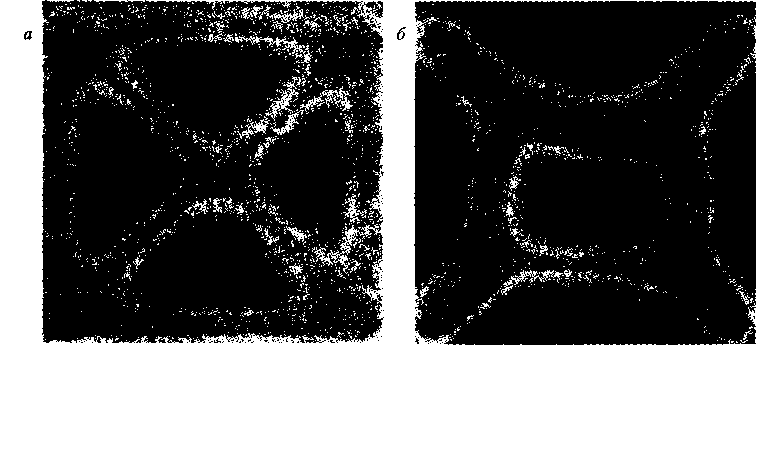
Рис. 6.9. Модель Хелбинга и его коллег, описывающая развитие системы пешеходных тропинок. На ранней стадии формирования (а) возникают прямолинейные маршруты, связывающие четыре угла описываемого участка, однако впоследствии возникает некий компромисс между различными «самыми прямыми» направлениями.
В этой модели Хелбинг и его коллеги исключали возможность движе ния пиплоидов по произвольным направлениям, считая, что все пешеходь в рассматриваемой системе появляются лишь в определенных местах и направляются к определенным точкам на периферии системы. Формирование тропинок оказалось непосредственно связанным с предпочтением, которое пиплоиды отдают тому или иному существующему маршруту движения. Вначале, естественно, пиплоиды предпочитают двигаться по простым и ясным прямым направлениям (рис. 6.9, а), однако затем они начинают выбирать тропинки, отклоняющиеся от прямых, в результате чего и возникают более протоптанные и предпочитаемые маршруты, представляющие собой некий компромисс между наиболее рациональными прямыми путями и путями менее удобными, но по какой-то причине более привлекательными, из-за чего наиболее точные, прямолинейные маршруты между углами участка как по диагоналям, так и по краям начинают сглаживаться, создавая некие отклонения в потоках движения (рис. 6.9, б). В результате обнаруживается, что все тропинки как-то огибают центральную часть, демонстрируя сходство с реальной картиной, представленной на рис. 6.8.
Кстати, планировщики парков и садов до сих пор часто привержены прямолинейному мышлению и продолжают создавать аллеи и прогулочные тропинки, исходя из геометрических рисунков с пересечениями под прямым углом и т. п. В отличие от этого реальные пешеходные тропинки возникают (или, на жаргоне специалистов этого направления, самоорганизуются) в виде кривых или как-то сливающихся линий. Именно из-за традиционности мышления планировщиков каждый из нас сталкивается с ситуацией, когда тщательно спроектированный участок большого газона вдруг покрывается сетью мелких тропинок, прокладываемых людьми под воздействием инстинктивных побуждений. Петер Молнар специально отметил тщетность попыток руководства одного из парков в Штутгарте препятствовать возникновению пешеходных тропинок в тщательно спланированном ландшафте и бессмысленность восстановления первоначальной геометрической планировки. Действуя совершенно ненамеренно, пешеходы противодействовали этим попыткам, постоянно воссоздавая какие-то пешеходные тропинки.
Планировщики парков поступили бы гораздо разумнее, если бы учли желания населения с самого начала, пользуясь предлагаемой моделью, а не пытались бы навязать собственные маршруты движения. Хелбинг считает, что при таком проектировании можно довольно просто связать требования экономики и эффективности, т. е. при заданных бюджетных ассигнованиях создать более удобные схемы пешеходных маршрутов или правильно развить уже существующие. В любом случае планировщикам следовало бы прислушаться к естественным намерениям и требованиям самих пешеходов[60].
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОК