О линейности и нелинейности
Истинные законы не могут быть линейными...
А. Эйнштейн
Прежде чем приступить к этой работе, еще раз обдумаем, что мы уже узнали о солитонах. В самых разных средах могут существовать и распространяться локализованные (т. е. сосредоточенные в ограниченной части пространства; от лат. locus — место) возбуждения, которые похожи на своеобразные деформируемые частицы. В научной литературе обычно употребляют для этих частиц названия «уединенная волна» или «солитон», причем солитонами обычно (особенно математики) называют уединенные волны, которые сохраняют свою индивидуальность при столкновении и описываются решениями некоторых специальных уравнений, подобных КдФ-уравнению. Мы позволим себе, как это делает большинство физиков, отклоняться от этого правила и зачастую называть солитонами всякие локализованные возбуждения, похожие на частицы (термин «солитоноподобное возбуждение» звучит слишком неуклюже, и мы его будем по возможности избегать). Это не приведет к недоразумениям, если идет речь о свойствах, общих для всех солитоноподобных возбуждений, а конкретные солитоны можно называть их индивидуальными именами.
Мы познакомились с солитонами трех типов. Они были открыты примерно в одно и то же время, но судьбы их складывались по-разному, а главное, в течение целого столетия никак не скрещивались. В большой мере это связано с тем, что для их правильного понимания необходимо было освободиться от представлений о линейности соответствующих им возбуждений. Принцип сложения возбуждений позволил разработать настолько общие и эффективные методы решения многочисленных задач физики, что многие стали сознательно или бессознательно считать его одним из основных принципов математической физики *). Отсюда возникло стремление хотя бы приближенно «линеаризовать» каждую физическую задачу, т. е. свести ее к такой, для которой в первом приближении принцип сложения выполняется. К нелинейным задачам не было никакого общего подхода, а потому и не могла возникнуть общая теория солитонов, которые по своей природе нелинейны. В некоторых счастливых случаях удавалось изучить конкретные нелинейные явления, такие, как волны Герстнера, КдФ-солитоны или простые гидродинамические вихри, но общую атмосферу это изменить не могло.
*) Как мы уже говорили, «досадным» исключением оставалась лишь гидродинамика.
Почему линейность так упрощает решение задачи? Проще всего это понять на простых примерах. Рассмотрим уравнение ах + y = 0, решения которого — это пары чисел (x, у), при подстановке которых оно обращается в тождество. Ясно, что всякое решение можно записать в виде (х0, -ax0), где x0 — произвольное число. Если изобразить решения точками на плоскости, то все решения лежат на прямой ОА, проходящей через точки О = (0, 0) и А = (1, -a). Если мы знаем только одно решение А, то, пользуясь линейностью, можно получить все решения умножением на произвольное число: х0А = (х0, -aх0). Математик скажет, что совокупность всех решений этого уравнения образует линейное одномерное многообразие. Для определения всех его точек достаточно задать одну точку, отличную от О (0, 0), например, А = (1, -a). Если  — две точки этого многообразия, то точка А3 = c1A1 + с2А2 =
— две точки этого многообразия, то точка А3 = c1A1 + с2А2 =  , при любых с1 и с2 тоже принадлежит этому многообразию (т. е. точка А3 тоже лежит на прямой ОА).
, при любых с1 и с2 тоже принадлежит этому многообразию (т. е. точка А3 тоже лежит на прямой ОА).
Точно также можно найти все решения уравнения ах + by + z = 0, т. е. тройки чисел (x, y, z), при подстановке которых уравнение обращается в тождество. Можно убедиться, что достаточно знать два решения, например,  , а все остальные получаются их линейными комбинациями, т. е.
, а все остальные получаются их линейными комбинациями, т. е.  . Это пример двумерного линейного многообразия. Геометрически можно изобразить его как плоскость в трехмерном пространстве (попробуйте проверить эти утверждения и нарисовать такую плоскость).
. Это пример двумерного линейного многообразия. Геометрически можно изобразить его как плоскость в трехмерном пространстве (попробуйте проверить эти утверждения и нарисовать такую плоскость).
Рассмотрим теперь более близкий к физике пример колебаний грузика на пружине. Отклонение грузика от положения равновесия x(t) подчиняется уравнению Ньютона  , где а(t) — ускорение грузика в момент t, ?0 — круговая частота, ?0 = 2?/Т, а Т — период колебаний грузика. Если x1(t) и x2(t) — два решения этого уравнения, описывающие какие-то два движения, то и любая их линейная комбинация
, где а(t) — ускорение грузика в момент t, ?0 — круговая частота, ?0 = 2?/Т, а Т — период колебаний грузика. Если x1(t) и x2(t) — два решения этого уравнения, описывающие какие-то два движения, то и любая их линейная комбинация  — тоже решение (т. е. х3(t) — возможное движение) *). Совокупность всех решений также образует линейное многообразие.
— тоже решение (т. е. х3(t) — возможное движение) *). Совокупность всех решений также образует линейное многообразие.
*) Так как ускорение a(t) линейно зависит от x(t).
Рассмотрим два движения: x1(t) = cos(?0t) и x2(t) = sin(?0t). Взяв  , можно написать произвольную линейную комбинацию из x1 и x2:
, можно написать произвольную линейную комбинацию из x1 и x2:  . Так получается самое общее выражение для отклонений грузика при колебаниях с амплитудой хM и фазой ?. По аналогии с рассмотренными нами алгебраическими уравнениями можно сказать, что линейное многообразие возможных колебаний двумерно. Каждое колебание грузика можно представить точкой на плоскости (с1, с2), и эти точки также образуют линейное многообразие.
. Так получается самое общее выражение для отклонений грузика при колебаниях с амплитудой хM и фазой ?. По аналогии с рассмотренными нами алгебраическими уравнениями можно сказать, что линейное многообразие возможных колебаний двумерно. Каждое колебание грузика можно представить точкой на плоскости (с1, с2), и эти точки также образуют линейное многообразие.
Над этими простыми примерами стоит как следует подумать. Важно понять, во-первых, что любое колебание грузика можно представить в виде суммы двух линейно независимых, т. е. не выражающихся друг через друга в виде линейных комбинаций колебаний x1 = cos(?0t) и x2 = sin(?0t) (вместо этих можно взять и другие линейно независимые решения). Наоборот, пусть известны два возможных колебания x1(t) и x2(t), отношение которых не постоянно, — такие колебания будут линейно независимыми. Тогда любое другое движение можно получить, подобрав подходящие числа с1 и с2 и складывая колебание с1x1(t) с с2x2(t). Важно, что при этом не нужно знать даже само уравнение. Достаточно иметь два независимых колебания и знать, что выполнен принцип линейности или принцип сложения колебаний.
Если линейности нет, то все выглядит гораздо сложнее. Возьмем самое простое уравнение y2 + аx2 = 0. Сразу ясно, что многообразие решений (x, у) будет иметь совершенно разный вид при разных знаках а. При а  0 оно состоит из единственной точки О = (0, 0). При а = 0 — это точки, лежащие на оси Оx, т. е. точки (x0, 0), где x0 — любое число. Если же а
0 оно состоит из единственной точки О = (0, 0). При а = 0 — это точки, лежащие на оси Оx, т. е. точки (x0, 0), где x0 — любое число. Если же а  0, то все решения имеют вид или
0, то все решения имеют вид или  , или
, или  , т. е. лежат либо на прямой ОА, либо на прямой ОB (рис. 3.9).
, т. е. лежат либо на прямой ОА, либо на прямой ОB (рис. 3.9).
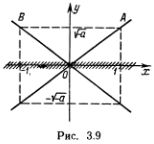
Ясно, что в этом случае многообразие решений нелинейно. Например, сумма двух написанных решений с одним и тем же х0 равна (2х0, 0), а х = 2х0, у = 0 не удовлетворяет нашему уравнению при  .
.
Так обстоит дело в самом простом случае. При усложнении уравнения уже совсем не просто выяснить, имеет ли оно решения, и если имеет, то сколько и как эти решения зависят от параметров, входящих в уравнения. В нашей простой задаче единственный параметр — это число а. При а 0 есть только нулевое решение, при а = 0 решения образуют линейное многообразие, а при а 0 многообразие решений становится нелинейным. В этом примере нелинейное многообразие устроено слишком просто, но небольшое изменение уравнения (скажем, добавка к левой части слагаемого bх, где число b может быть очень малым) приводит к очень серьезным, качественным изменениям структуры множества решений (убедитесь в этом!).
Вообще, такая сильная, качественная зависимость решений от параметров, появление новых решений (или их исчезновение) — самое характерное свойство нелинейных уравнений. С простыми примерами такого проявления нелинейности в движениях тел мы сталкиваемся очень часто. Когда мы пытаемся сдвинуть с места стоящий на ровном месте автомобиль, мы постепенно увеличиваем усилие, но автомобиль не двигается, пока усилие не достигнет определенного значения. После того как автомобиль начнет двигаться, его довольно легко разогнать, прилагая меньшее усилие. Этот эффект возникает из-за нелинейности силы трения — при движении автомобиля сила трения меньше, чем в покое. Нелинейность этого типа можно назвать «пороговой» нелинейностью. При достаточно малых воздействиях (ниже «порога») система находится в одном состоянии (автомобиль не движется), при достижении порога система переходит в другое состояние, в котором воздействие можно уменьшить или даже убрать (катящийся автомобиль может двигаться некоторое время по инерции).
Пороговая нелинейность ясно видна и в механизме возбуждения нервного импульса. Малые раздражения, вообще говоря, не приводят к возбуждению импульса; он пойдет лишь при достаточно сильном раздражении. Если бы не было этой нелинейности, наша жизнь стала бы совершенно невозможной. В теории солитонов более важны нелинейности других типов. С ними мы познакомимся в следующих главах.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОК