§ 3. Движения в упругом теле
Мы подчеркивали, что в упругом теле, находящемся в равновесии, внутренние напряжения распределяются так, чтобы энергия была минимальной. Посмотрим теперь, что происходит, если внутренние силы не уравновешены. Возьмем маленький кусочек материала внутри некоторой поверхности А (фиг. 39.5).
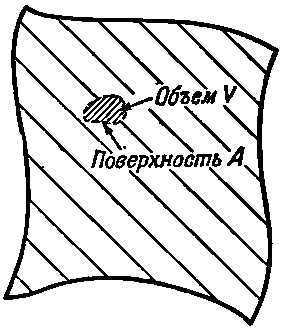
Фиг. 39.5. Маленький элемент объема V, ограниченный поверхностью А,
Если этот кусочек находится в равновесии, то полная действующая на него сила F должна быть равна нулю. Можно считать, что эта сила состоит из двух частей, одна из которых обусловлена «внешними» силами, подобными гравитации, действующими на расстоянии на вещество нашего кусочка и приводящими к величине силы на единицу объема fвнешн. Полная же внешняя сила Fвнешн равна интегралу от fвнешн по всему объему кусочка:
 (39.23)
(39.23)
В равновесии эти силы балансируются полной силой Fвнутр, действующей по поверхности А со стороны окружающего материала. Когда же этот кусочек не находится в равновесии, а движется, сумма внутренних и внешних сил будет равна произведению массы на ускорение. При этом мы получаем
 (39.24)
(39.24)
где ?—плотность материала, а ..r — его ускорение. Теперь мы можем скомбинировать уравнения (39.23) и (39.24) и написать
 (39.25)
(39.25)
Нашу запись можно упростить, положив
 (39.26)
(39.26)
Тогда уравнение (39.25) запишется в виде
 (39.27)
(39.27)
Величина, названная нами Fвнутр, связана с напряжениями в материале. Тензор напряжений Sij был определен нами в гл. 31 таким образом, что x-компонента силы dF, действующей на элемент поверхности da с нормалью n, задается выражением
 (39.28)
(39.28)
Отсюда х-компонента силы Fвнутр, действующей на наш кусочек, равна интегралу от dFx по всей поверхности. Подставляя это в x-компоненту уравнения (39.27), получаем
 (39.29)
(39.29)
Оказалось, что поверхностный интеграл связан с интегралом по объему, а это напоминает нам нечто знакомое по главам об электричестве. Заметьте, что если не обращать внимания на первый значок х в каждом из S в левой части (39.29), то она выглядит в точности как интеграл от величины (S·n), т.е. нормальной компоненты вектора по поверхности. Она была бы равна потоку S через объем. А используя теорему Гаусса, поток можно было бы записать в виде объемного интеграла от дивергенции S. На самом деле все это справедливо независимо от того, есть ли у нас индекс х или нет. Это просто математическая теорема, которая доказывается интегрированием по частям. Другими словами, уравнение (39.29) можно превратить в
 (39.30)
(39.30)
Теперь можно отбросить интегралы по объему и написать дифференциальное уравнение для любой компоненты f:
 (39.31)
(39.31)
Оно говорит нам, как связана сила, действующая на единицу объема с тензором напряжения Sij.
Вот как работает эта теория внутренних движений твердого тела. Если первоначально нам известны перемещения, задаваемые, скажем, вектором u, то можно найти деформации eij. Из деформаций с помощью уравнения (39.12) можно получить напряжения. Затем с помощью уравнения (39.31) мы из напряжений можем найти плотности сил f. А зная f, мы из уравнения (39.26) получаем ускорение ..r в материале, которое подскажет нам, как изменятся перемещения. Собирая все это вместе, мы получаем ужасно сложные уравнения движения упругого твердого тела. Я просто напишу вам ответ для изотропного материала. Если вы воспользуетесь для Sij уравнением (39.20) и запишете eij в виде 1/2 (?ui/?xj+?uj/?xi), то окончательно получите векторное уравнение:
 (39.32)
(39.32)
Вы можете очень просто убедиться в том, что уравнение должно иметь такую форму. Сила должна зависеть от второй производной — перемещения u. Но какие можно составить вторые производные u так, чтобы они были векторами? Одна из них ?(?·u); это самый настоящий вектор. Есть еще только одна такая комбинация — это ?2u. Так что наиболее общей формой силы будет

что как раз дает (39.32) с другим определением постоянных. Вас может удивить, почему у нас нет третьего слагаемого ????u, которое тоже вектор. Но вспомните, что ????u в точности равно ?2u-?(?·u), т. е. это линейная комбинация двух уже написанных слагаемых. Так что оно не добавит ничего нового. Мы еще раз доказали, что в изотропном материале есть только две упругие постоянные.
Для получения уравнения движения материала мы можем положить выражение (39.32) равным ??2u/?t2 и, пренебрегая объемными силами типа силы тяжести, написать
 (39.33)
(39.33)
Это уравнение выглядит похожим на волновое уравнение, с которым мы познакомились в электромагнетизме, за исключением одного добавленного слагаемого, которое усложняет дело. Для материалов, упругие свойства которых всюду одинаковы, мы можем увидеть, на что похоже общее решение. Вы, наверное, помните, что любое векторное поле может быть записано в виде суммы двух векторов, у одного из которых нулю равна дивергенция, а у другого — ротор. Другими словами, можно положить
 (39.34)
(39.34)
где
 (39.35)
(39.35)
Подставляя вместо u в уравнении (39.33) u1+u2, получаем
 (39.36)
(39.36)
Взяв дивергенцию этого уравнения, мы можем исключить из него u1:

Поскольку операторы ?2 и ? могут быть переставлены, можно вынести оператор дивергенции и получить
 (39.37)
(39.37)
А так как ??u2, по определению, равно нулю, то ротор выражения в фигурных скобках также будет нулем, так что выражение в скобках само по себе тождественно равно нулю и
 (39.38)
(39.38)
Это векторное волновое уравнение для волн, движущихся со скоростью С2=?(?+2?)/?. Поскольку ротор u2 есть нуль, то эти волны не связаны со сдвигом, а представляют просто волны сжатия наподобие звуковых, которые мы изучали в предыдущих главах и скорость которых как раз равна найденной нами для Спрод.
Подобным же образом, беря ротор уравнения (39.36), можно показать, что u1 удовлетворяет уравнению
 (39.39)
(39.39)
Это снова векторное волновое уравнение для волн, распространяющихся со скоростью C2=??/?. Поскольку ?·u1 равно нулю, то перемещение u1 не приводит к изменению плотности; вектор u1 соответствует поперечным или сдвиговым волнам, которые встречались нам в предыдущей главе, а C2=Cсдвиг.
Если мы хотим знать статические напряжения в изотропном материале, то в принципе их можно найти, решая уравнение (39.32) с f, равным нулю (или равным статическим объемным силам, обусловленным силой тяжести, такой, как ?g) при определенных условиях, связанных с силами, действующими на поверхности нашего большого куска материала. Сделать это несколько сложнее, чем в соответствующих задачах электромагнетизма. Во-первых, это более трудно потому, что сами уравнения несколько сложнее, и, во-вторых, формы тех упругих тел, которыми мы обычно интересуемся, гораздо сложнее. На лекциях по электричеству мы часто интересовались решением уравнений Максвелла в областях сравнительно простой геометрической формы, таких, как цилиндр, сфера и т. д. В теории упругости, нам приходится заниматься объектами гораздо более сложной формы, например крюком подъемного крана, или коленчатым автомобильным валом, или ротором газовой турбины. Такие задачи иногда можно приближенно решить численным методом, воспользовавшись принципом минимальной энергии, о котором мы упомянули ранее. Другой способ — это воспользоваться моделями предметов и измерять внутренние напряжения экспериментально с помощью поляризованного света.
Метод этот состоит в следующем. Когда кусок упругого изотропного материала, например прозрачную пластмассу типа плексигласа, подвергают напряжению, в ней возникает двойное лучепреломление. Если пропускать через эту пластмассу поляризованный свет, то плоскость поляризации повернется на величину, связанную с напряжением. Измеряя угол плоскости поляризации, можно измерить напряжение. На фиг. 39.6 показан примерный вид этого устройства, а на фиг. 39.7 приведена фотография упругой модели сложной формы под напряжением.
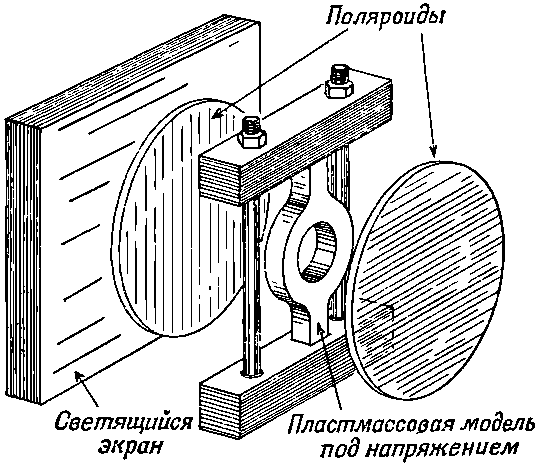
Фиг. 39.6. Измерение внутренних напряжений с помощью поляризованного света.
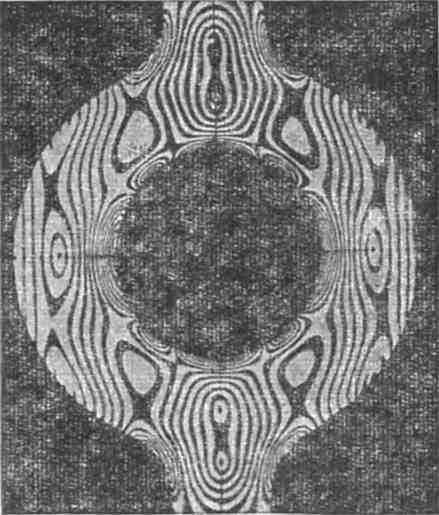
Фиг. 39.7. Вид напряженной пластмассовой модели между двумя скрещенными поляроидами.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОК