§ 1. Четырехвекторы
В этой главе мы рассмотрим применение специальной теории относительности к электродинамике. Мы изучали теорию относительности довольно давно (гл. 15—17, вып. 2), поэтому я здесь коротко напомню основные идеи.
Экспериментально установлено, что законы физики при равномерном движении не изменяются. Если вы находитесь внутри звездолета, летящего с постоянной скоростью по прямой линии, то не можете установить самого факта движения корабля: для этого надо выглянуть наружу или по крайней мере провести какие-то наблюдения, связанные с внешним миром. Любой написанный нами истинный закон физики должен быть сформулирован так, чтобы этот факт природы был «встроен» в него.
Соотношение между пространством и временем в двух системах координат (одна из которых S' равномерно движется относительно другой S в направлении оси х со скоростью v) определяется преобразованиями Лоренца:
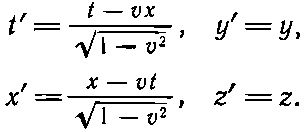 (25.1)
(25.1)
Законы физики должны быть таковы, чтобы после преобразований Лоренца они в новой форме выглядели абсолютно так же, как и раньше. Это в точности напоминает принцип независимости законов физики от ориентации нашей системы координат. В гл. 11 (вып. 1) мы видели, что способом математического описания этой инвариантности относительно вращения является запись уравнений в векторном виде.
Там мы обнаружили, что если, скажем, взять два вектора

то комбинация

при повороте системы координат не меняется. Таким образом, если с обеих сторон уравнения мы видим скалярное произведение, подобное А·В, то уравнение будет иметь в точности ту же форму в любой повернутой системе координат. Кроме того, мы открыли оператор (см. гл. 2)

который, будучи применен к скалярной функции, дает три величины, преобразующиеся в точности как вектор. С помощью этого оператора был определен градиент, а в комбинации с другими векторами — дивергенция и лапласиан. И, наконец, мы обнаружили, что, составляя суммы некоторых попарных произведений компонент двух векторов, можно получить три величины, которые ведут себя подобно новому вектору. Мы назвали это векторным произведением двух векторов. Используя затем векторное произведение с оператором ?, мы определили ротор вектора. В дальнейшем нам часто придется ссылаться на то, что было нами сделано в векторном анализе, поэтому все важнейшие векторные операции в трехмерном пространстве, которые использовались в прошлом, мы собрали в табл. 25.1.
Таблица 25.1. ВАЖНЕЙШИЕ ВЕЛИЧИНЫ И ОПЕРАТОРЫ ТРЕХМЕРНОГО ВЕКТОРНОГО АНАЛИЗА
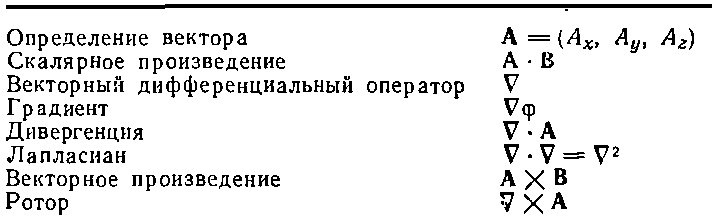
Пользуясь ею, можно так записать любое уравнение физики, что обе его части преобразуются при вращениях одинаковым образом. Если одна его часть — вектор, то вектором должна быть и другая часть, и обе они при вращении системы координат изменяются в точности одинаково. Аналогично, если одна часть скаляр, то скаляром должна быть и другая часть, так что ни та, ни другая не изменяется при вращении системы координат и т. д.
В теории относительности пространство и время неразделимо связаны друг с другом, поэтому то же самое придется проделать и для четырех измерений. Мы хотим, чтобы наши уравнения оставались неизменными не только при вращениях, но и при переходе в любую инерциальную систему. Это означает, что наши уравнения должны быть инвариантными относительно преобразований Лоренца (25.1). Цель настоящей главы — показать, как этого можно добиться. Но прежде чем начать, примем соглашение, которое значительно облегчит нашу работу (и к тому же поможет избежать путаницы). Заключается оно в таком выборе единиц измерения длины и времени, чтобы скорость света с оказалась равной единице. Вы можете считать, например, что в качестве единицы времени взят интервал, за который свет проходит отрезок в один метр (это составляет около 3·10-9 сек). Можно даже так и назвать эту единицу времени: «один световой метр». Использование этой единицы еще ярче оттеняет симметрию пространства и времени. Кроме того, из наших релятивистских уравнений исчезнут все с. (Если это почему-либо вас смущает, то вы можете в любом уравнении восстановить их или заменить каждое t на ct, а еще лучше вставить с повсюду, где это необходимо для правильной размерности уравнения.) Теперь, после такой подготовки, мы можем двинуться дальше.
Наша программа состоит в том, чтобы повторить в четырехмерном пространстве-времени все то, что мы делали с векторами в трех измерениях. Дело это нехитрое — мы просто будем действовать аналогично. Единственное затруднение встретится только при обозначениях (символ вектора у нас уже занят трехмерными векторами), и несколько изменятся знаки в скалярном произведении.
Прежде всего, по аналогии с векторами в трехмерном пространстве, введем четырехвектор как набор четырех величин at, ах, ау и аz, которые при переходе в движущуюся систему координат преобразуются подобно t, x, у и z. Для обозначения четырехвектора используется несколько различных способов. Мы же будем писать просто а?, понимая под этим группу четырех величин (at, ax, ay, az); другими словами, значок ? принимает какое-либо из четырех «значений»: t, x, у и z. Иногда нам будет удобно обозначать три пространственные компоненты в виде трехмерного вектора, т. е. писать a?=(at, а).
Мы уже сталкивались с одним таким четырехвектором, состоящим из энергии и импульса частицы (см. гл. 17, вып. 2). В наших новых обозначениях он запишется так:
 (25.2)
(25.2)
т. е. четырехвектор p? состоит из энергии Е и трех компонент трехмерного импульса частицы р.
Похоже, что игра действительно оказывается нехитрой: единственное, что мы должны сделать,— это найти для каждого трехмерного вектора недостающую компоненту и получить четырехвектор. Однако все же эта задача потруднее, чем кажется на первый взгляд. Возьмем, например, вектор скорости с компонентами

Что будет его временной компонентой? Инстинкт подсказывает нам, что поскольку четырехвектор подобен t, x, у, z, то временной компонентой как будто должно быть
Но это неверно. Дело в том, что время t в каждом знаменателе не инвариантно при преобразованиях Лоренца. Числитель имеет правильное поведение, а dt в знаменателе портит все дело: оно не одинаково в двух различных системах.
Оказывается, что четыре компоненты «скорости», которые нам нужно выписать, превратятся в компоненты четырехвектора, если мы попросту поделим их на ?(1-v2). В правильности этого можно убедиться, взяв четырехвектор импульса
 (25.3)
(25.3)
и поделив его на массу покоя, которая в четырехмерном пространстве является скаляром. Мы получим при этом
 (25.4)
(25.4)
что по-прежнему должно быть четырехвектором. (Деление на скаляр не изменяет трансформационных свойств.) Так что четырехвектор скорости u? можно определить так:
 (25.5)
(25.5)
Это очень полезная величина; мы можем теперь написать, например,
 (25.6)
(25.6)
Таков типичный вид, который должен иметь правильное релятивистское уравнение: каждая сторона его должна быть четырехвектором. (В правой части стоит произведение инварианта на четырехвектор, которое по-прежнему есть четырехвектор.)
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОК